Clear Sky Science · ar
تطوير وتقييم نظام توجيه وضعية المريض السطحي لعلاج التقاط النيوترونات بالبورون
تصويب أدق لنيترونات مقاومة للسرطان
يعد علاج التقاط النيوترونات بالبورون (BNCT) علاجًا واعدًا للسرطان يمكنه إحداث تلف انتقائي للخلايا الورمية مع الحفاظ على معظم الأنسجة السليمة المحيطة. لكن لكي تؤتي هذه الدقة ثمارها، يجب على الأطباء وضع المريض في الموضع الصحيح تمامًا أمام حزمة نيوترونات ثابتة—غالبًا ضمن مليمتر واحد. تصف هذه الورقة نظام تحديد موضع جديدًا موجهًا بالكاميرا والروبوت مصممًا لجعل هذا الإعداد الدقيق أسرع وأكثر دقة وأقل اعتمادًا على مهارة وحكم الفني.
لماذا تهم طريقة التمركز إلى هذا الحد
على خلاف العديد من أجهزة الإشعاع الحديثة التي يمكنها الدوران حول المريض وإعادة تشكيل حزم الأشعة السينية، يعتمد BNCT على مصدر نيوترونات ثقي�ل وثابت بقدرات محدودة لتوجيه الحزمة. يجب أن يتحرك المريض، وليس الحزمة، إلى المكان المناسب. تقليديًا، يستخدم الطاقم ليزرات وعلامات على الجلد وتحريك الطاولة يدويًا للقيام بذلك. هذه العملية بطيئة، وتعتمد بشدة على مهارة المشغل، وقد تترك أخطاء موضعية صغيرة تغير مقدار الجرعة التي يتلقاها الورم—والأعضاء القريبة. مع افتتاح مراكز BNCT لعلاج الأورام المعقدة في الرأس والعنق ومناطق صعبة الوصول الأخرى، تصبح هذه القيود عقبة خطيرة.
مساعد عالي التقنية: كاميرات وبرمجيات وروبوت
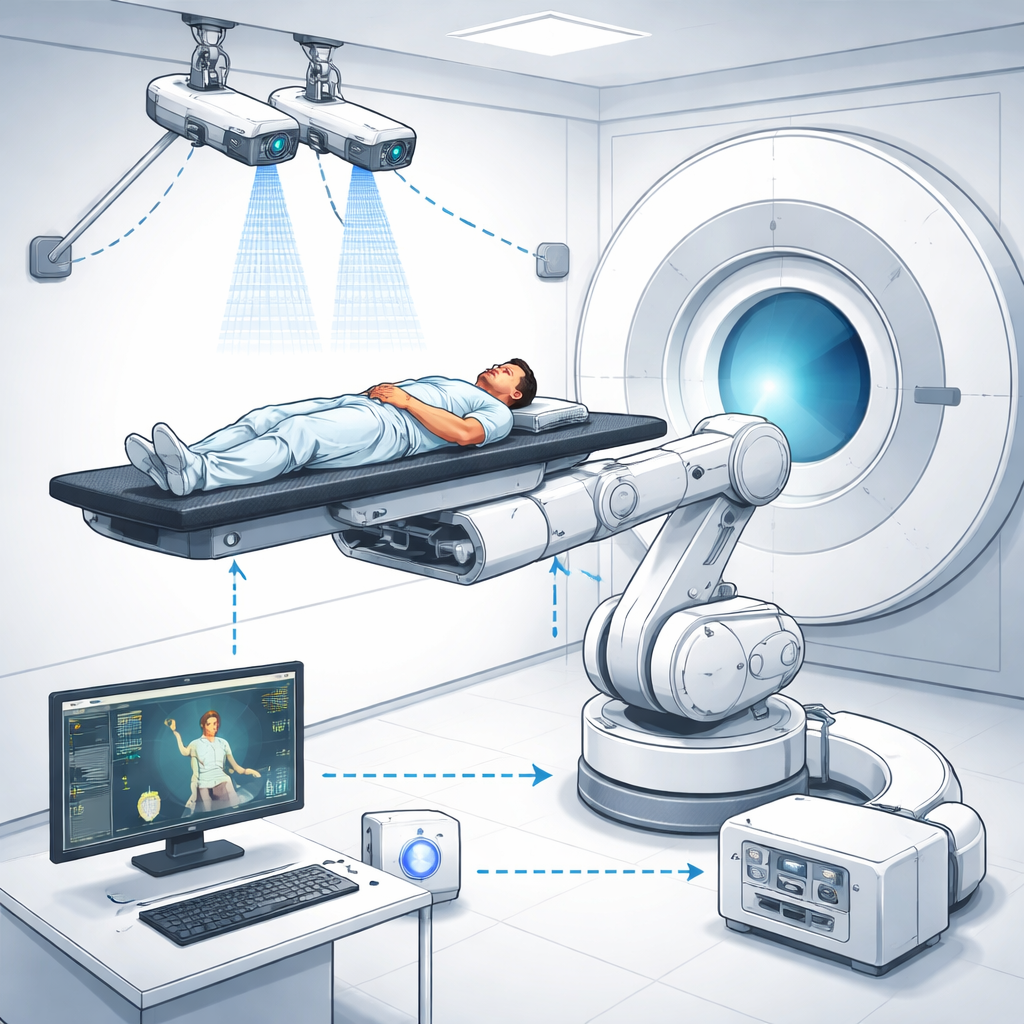
لمعالجة هذه المشكلة، بنى فريق البحث نظامًا متكاملًا لتوجيه السطح في BNCT (SG‑BNCT) يجمع بين ثلاثة عناصر رئيسية: برنامج تخطيط علاج متخصص يسمى NeuMANTA، زوج كاميرات رؤية ستيريو ثنائية، وروبوت صناعي ذو ستة محاور يحمل سرير العلاج. في NeuMANTA، يخطط الأطباء لعلاج BNCT على صور CT، بما في ذلك النقطة الدقيقة التي يجب أن تمر خلالها حزمة النيوترونات وثلاث نقاط مرجعية صغيرة، أو علامات تعريفية، على جلد المريض. تحدد هذه العلامات وضع المريض في صور التخطيط وتربط ذلك التخطيط بإحداثيات غرفة العلاج الحقيقية عبر مصفوفات تحويل رياضية.
كيف ترى كاميرات ثلاثية الأبعاد وتصحح الإعداد
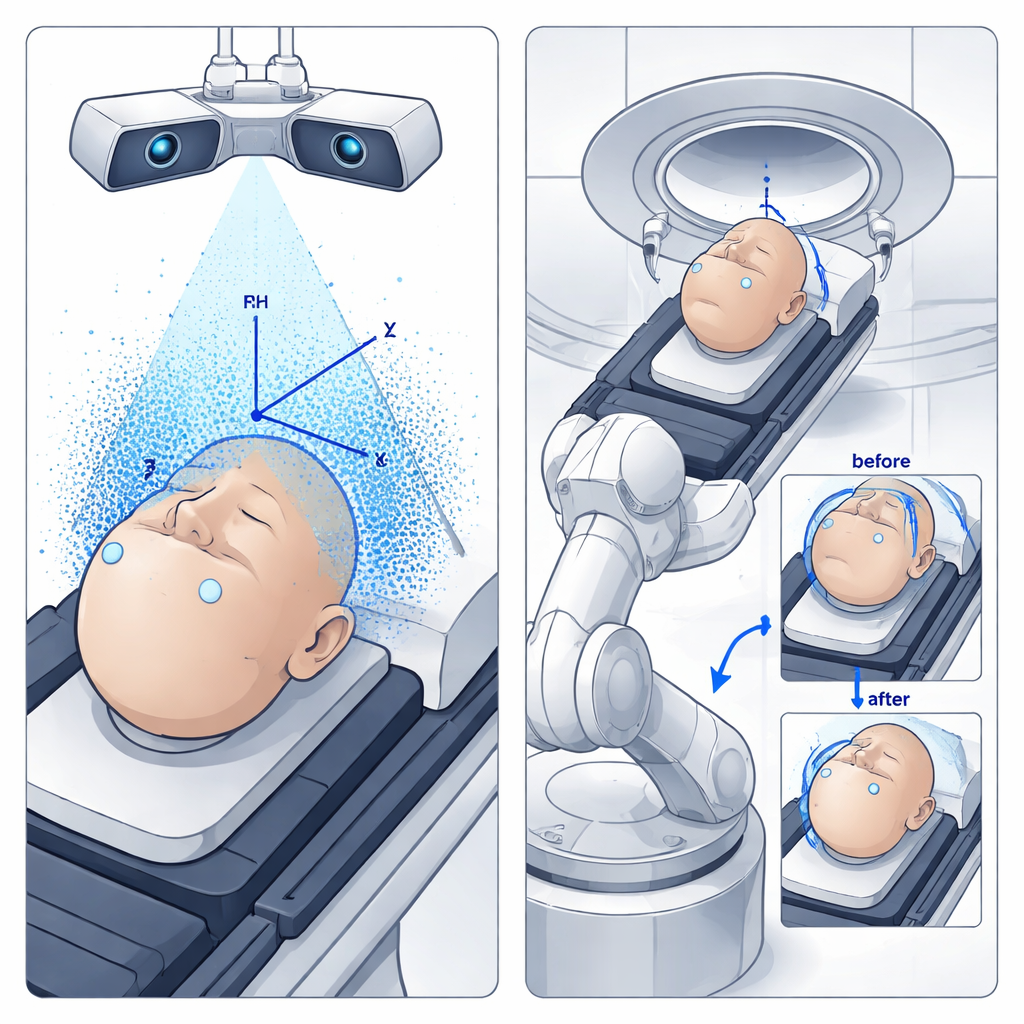
في غرفة العلاج، تراقب كاميرتان عاليتا الدقة المريض من زوايا مختلفة، تمامًا مثل عيون الإنسان. باستخدام خوارزمية كشف كائنات حديثة (YOLO) مدرّبة على أكثر من ألف صورة، يعثر النظام بسرعة على نفس العلامات المرجعية على سطح المريض. من خلال مقارنة كيفية ظهور كل علامة في منظر الكاميرا اليسرى واليمنى، يعيد الحاسوب بناء مواقعها ثلاثية الأبعاد وينشئ سحابة نقطية مفصلة للسطح. من ثلاث علامات غير متعامدة يعيد بناء نظام إحداثيات المريض ويقارنه مع نظام الإحداثيات المحدد في خطة العلاج. تتحول أي فروق بين الوضع المخطط والوضع الفعلي إلى أوامر ترجمة ودوران—ست درجات حرية إجمالاً—للروبوت الصناعي الذي يحمل سرير المريض.
الاختبار مع مريض وهمي
قبل استخدام النظام على مرضى حقيقيين، اختبر الفريق النظام بستخدم شبح أنثروبومورفي—نموذج على شكل إنسان—مزوّد بعلامات داخلية وسطحية مرئية في صور CT وللكاميرات. أنشأوا عدة إعدادات علاجية في NeuMANTA مع اتجاهات شعاع مختلفة ثم طلبوا من نظام SG‑BNCT إعادة إنتاج هذه الخطط عن طريق تحريك الشبح تلقائيًا إلى الموضع المطلوب. عملت ليزر موضوعة في مركز فتحة حزمة النيوترونات كبديل للحزمة الفعلية، حتى يتمكن الباحثون من قياس المسافة التي انحرف فيها الموضع النهائي على الشبح عن الهدف المقصود مباشرة، سواء على طول اتجاه الحزمة (المسافة من المصدر إلى الجلد) أو جانبياً في المستوى العمودي على الحزمة.
إلى أي مدى اقترب النظام؟
عبر 24 إعدادًا تجريبيًا، كانت أخطاء تموضع النظام عادة أقل من مليمتر واحد في كلا الاتجاهين، مع أسوأ الأخطاء في تمريرة واحدة تصل إلى حوالي 2 إلى 3 مليمترات على طول محور الحزمة. عزى المؤلفون هذه الفروق المتبقية إلى ثلاث مصادر رئيسية: سمك شرائح صور CT، وعدم دقة معايرة صغيرة في كاميرات الستيريو، وعدم دقة طفيفية على مستوى البكسل عند اكتشاف البرمجيات للعلامات. والأهم أن النظام مصمم للعمل في حلقة مغلقة: فهو يعيد قياس مواضع العلامات بشكل متكرر، ويحدّث المحاذاة ثلاثية الأبعاد، ويصدر أوامر بحركات إضافية دقيقة للروبوت حتى يقع الخطأ المتبقي تحت عتبة محددة سلفًا. في هذه الاختبارات التكرارية، انخفضت الانحرافات النهائية باستمرار إلى أقل بكثير من مليمتر واحد، محققة محاذاة تحت المليمتر في كل من اتجاه العمق والاتجاه الجانبي.
ماذا يعني هذا للمرضى
بالنسبة للمرضى الذين قد يستفيدون من BNCT—وخاصة المصابين بأورام في مناطق معقدة أو حساسة—يعد هذا النظام الموجّه سطحيًا والمساعد بالروبوت بوعد توفير علاجات أكثر موثوقية وكفاءة. من خلال ربط برنامج تخطيط العلاج مباشرة بكاميرات ترى المريض الفعلي وبروبوت قادر على تنفيذ حركات دقيقة، يقلل الأسلوب الاعتماد على محاذاة الليزر اليدوية والتخمين البشري. بينما النسخة الحالية بطيئة جدًا لتتبُّع الحركة في الوقت الحقيقي، ولم تُجرَ سوى اختبارات ثابتة حتى الآن، تُظهر النتائج أن التكنولوجيا قادرة على وضع المريض بدقة تحت المليمتر بشكل روتيني. مع مزيد من تحسين السرعة وتزويد الأجهزة بمقاومة للإشعاع، قد يصبح هذا النهج عمودًا عمليًا لعلاجات BNCT أكثر أمانًا واتساقًا في العيادات.
الاستشهاد: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
الكلمات المفتاحية: علاج التقاط النيوترونات بالبورون, تحديد موضع المريض, رؤية ستيريو, روبوتيات طبية, الإرشاد السطحي