Clear Sky Science · ar
CRFusion: شبكة اندماج جديدة ليدار-كاميرا لبناء خرائط BEV
خرائط رقمية أكثر ذكاءً للسيارات ذاتية القيادة
بالنسبة للسيارة ذاتية القيادة، فهم الطريق أمامها يشبه قراءة خريطة متغيرة باستمرار. يجب أن تعرف المركبة بدقة مواضع المسارات وممرات المشاة وحواف الطريق، حتى في الظلام أو الأمطار أو عندما تغطي عوائق الرؤية. تقدم هذه الورقة CRFusion، نظامًا جديدًا يجمع بين الماسحات الليزرية والكاميرات لبناء خرائط علوية أنظف وأكثر موثوقية لشوارع المدينة، مما يساعد السيارات ذاتية القيادة على البقاء في مساراتها وتجنب المشاة بثقة أكبر.
لماذا عينان إلكترونيتان أفضل من واحدة
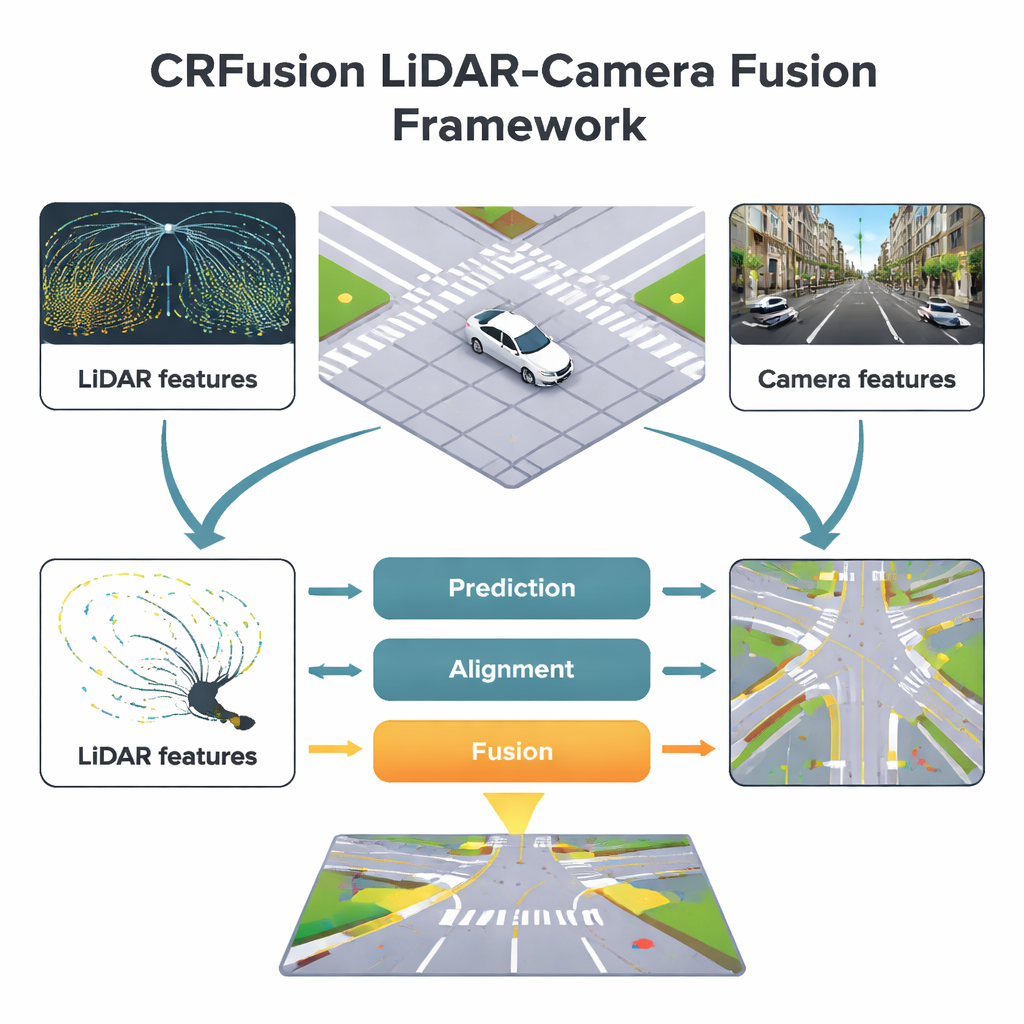
تعتمد السيارات ذاتية القيادة الحديثة بشكل كبير على مستشعرين رئيسيين. تلتقط الكاميرات صورًا ملونة غنية، مما يسهل اكتشاف طلاء المسارات وإشارات المرور وممرات المشاة عن بُعد. أما الماسحات الليزرية (ليدار) فتبث نبضات ضوئية وتقيس عودتها، فتبني صورة ثلاثية الأبعاد دقيقة للمسافات والأشكال حول السيارة. لكل منهما نقاط ضعف: قد تخدع الصور الكاميرا في الإضاءة الضعيفة أو الطقس السيئ، بينما تصبح قياسات الليدار متناثرة وغير كاملة مع زيادة المسافة. صُمم CRFusion لدمج نقاط قوة وضعف الاثنين في منظور طائر واحد — خريطة علوية حيث يمثل كل بكسل بقعة صغيرة من الأرض مصنفة كمسار أو فاصلة أو ممر للمشاة.
ملء الفجوات في الرؤية بعيدة المدى
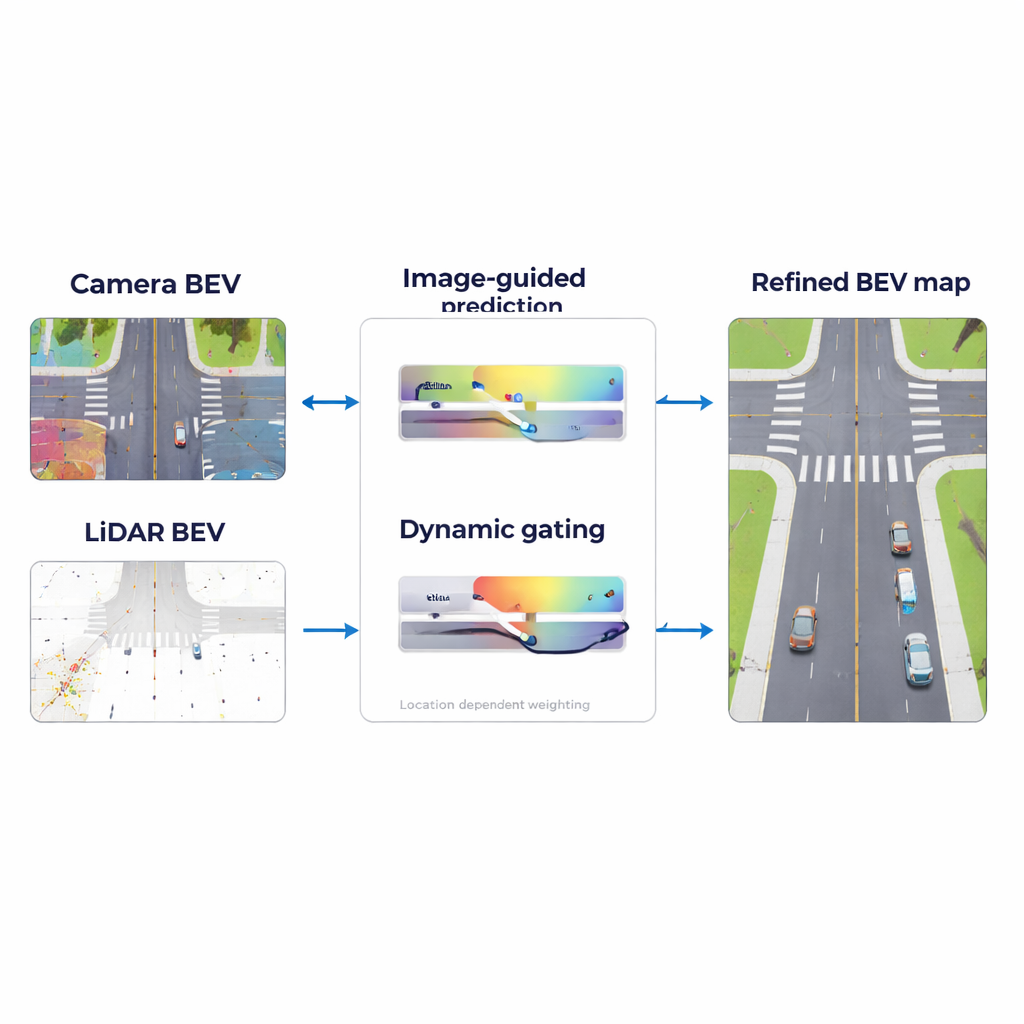
تتمثل تحديات رئيسية في رسم خرائط الطرق في أن الليدار غالبًا ما يفقد التفاصيل البعيدة عن السيارة، وهي المنطقة التي تكون فيها التخطيط المسبق الأهم. يتعامل CRFusion مع هذا عبر «متنبئ مدى الليدار». ببساطة، ينظر النظام إلى ما تراه الكاميرا بعيدًا على الطريق ويستخدم تلك المعلومة لتخمين ما كان ليقيسه الليدار لو كان كثيفًا وكاملاً. يساعده آلية تُعرف بالانتباه على تحديد أي أجزاء من رؤية الكاميرا تشرح أفضل المناطق الفارغة أو غير المؤكدة في خريطة الليدار. ثم يصقل هذا التنبؤ بمقارنة المناطق المجاورة في الخريطة، مع تعزيزه للأنماط المتسقة مثل خطوط المسار المستمرة وتقليل الضوضاء العشوائية.
مزامنة المستشعرات لتكوين نفس الصورة
حتى عندما يعمل كل من الكاميرا والليدار بشكل جيد، فإنهما لا يتطابقان تمامًا. قد تسبب أخطاء صغيرة في تقدير المسافات أو موضع المستشعر انزياحًا طفيفًا في ظهور علامات المسار في صورة الكاميرا مقارنة بقياسات الليدار. يقدم CRFusion خطوة محاذاة تقوم بـ«تشكيل» خفيف لميزات الكاميرا العلوية بحيث تتطابق بشكل أفضل مع منظور الليدار. يتم ذلك باستخدام شبكة تصحيح خفيفة تتنبأ بكيفية تحريك كل نقطة في خريطة الكاميرا. نتيجة لذلك، تصف وجهتا المستشعر نفس مواضع الطريق الفعلية، مما يجعل الدمج اللاحق أكثر موثوقية بكثير.
التكيف مع النهار والليل والطقس السيئ
حتى بعد محاذاة وجهتي المستشعر، يجب على النظام أن يقرر مقدار الثقة في كل منهما في كل موقع. الطريق المشمس مع طلاء مسارات واضح يختلف كثيرًا عن ليلة ممطرة في مدينة مزدحمة. يعالج CRFusion ذلك بوحدة «الدمج البوّابة الديناميكي» التي تمنح أوزانًا مرنة لميزات الكاميرا والليدار عبر الخريطة. حيث تكون عوائد الليدار قوية، مثل حواف الطرق القريبة أو الأجسام الصلبة، يميل النظام إلى الاعتماد أكثر على الليدار. حيث تكون الأدلة البصرية أوضح، مثل خطوط ممر المشاة المضاءة عن بُعد، يعتمد أكثر على الكاميرا. تُستَخلص هذه الأوزان تلقائيًا من البيانات، مما يسمح لاستراتيجية الدمج بالتغير بسلاسة مع تبدل الظروف.
إثبات الفائدة على بيانات العالم الحقيقي
اختبر الباحثون CRFusion على مجموعة بيانات واسعة الاستخدام في القيادة الذاتية تُسمى NuScenes، والتي تتضمن العديد من مشاهد القيادة في مدن وأجواء وأوقات مختلفة من اليوم. مقارنة بالطرق الرائدة السابقة، أنتج CRFusion حدود مسارات وفواصل وممرات مشاة أكثر دقة، خصوصًا على المسافات المتوسطة والطويلة حتى 90 مترًا. حسّن مقاييس جودة معيارية لكل من التداخل مع الخرائط الحقيقية وقدرة الكشف عن مقاطع المسار الفردية، وأظهرت دراسة «إزالة المكونات» أن كل مكوّن رئيسي — التنبؤ بعيد المدى، شبكة المحاذاة والدمج الديناميكي — ساهم بتحسينات ملموسة. كشفت الأمثلة البصرية عن استمرارية أكثر سلاسة للمسارات وممرات مشاة أوضح، مؤكدًة أن خرائط النظام تبدو أقرب إلى مخططات طرق مرسومة بعناية.
ماذا يعني هذا للقيادة اليومية
بالنسبة لغير المتخصصين، الخلاصة أن CRFusion يساعد السيارات ذاتية القيادة على بناء خرائط شوارع أنظف وأكثر اعتمادية من خلال جعل الكاميرات والليدار «يتواصَلان» بطريقة أذكى. عبر توقع معلومات الليدار المفقودة من رؤى الكاميرا، ومحاذاة منظورَيْ المستشعرين، وتعديل مقدار الثقة في كل منهما وفقًا للحالة، يقلل النظام النقاط العمياء والاعتماد على التخمين. هذا يقرب المركبات الذاتية خطوة نحو التعامل مع شوارع المدن المعقّدة والمزدحمة بثقة مماثلة لسائق بشري حريص يتبع مسارات وممرات مشاة واضحة.
الاستشهاد: Guan, Y., Wang, T., Cheng, Q. et al. CRFusion: a novel LiDAR-camera fusion network for BEV map construction. Sci Rep 16, 5169 (2026). https://doi.org/10.1038/s41598-026-35551-0
الكلمات المفتاحية: القيادة الذاتية, اندماج ليدار-كاميرا, خرائط دلالية عالية الدقة, الإدراك من منظور طائر, رسم خرائط الطرق الحضرية