Clear Sky Science · ar
تصميم وتنفيذ تحكم ذراع روبوت بست درجات حرية مع اكتشاف الأشياء باستخدام تعلم الآلة على متحكم دقيق مصغر
أذرع روبوتية أذكى بميزانية أصغر
تخيل ذراع روبوت في مصنع يمكنه التعرف على جسم، واتخاذ قرار بكيفية الإمساك به، والتحرك بسلاسة إلى موضعه—كل ذلك دون الاعتماد على حاسوب ضخم أو اتصال سحابي. تصف هذه الورقة البحثية بالضبط ذلك: ذراع روبوت ذو ستة مفاصل (ست درجات حرية) يرى ويقرر باستخدام متحكم دقيق صغير ومنخفض التكلفة. بالنسبة للقراء المهتمين بكيفية هروب الذكاء الاصطناعي من مركز البيانات ودخوله إلى الآلات اليومية، توضح هذه الدراسة كيف يمكن لتقنيات الرؤية والتحكم المتقدمة أن تعمل على أجهزة لا تكاد تكون أكبر من ذاكرة USB.
لماذا يهم تصغير عقول الروبوتات
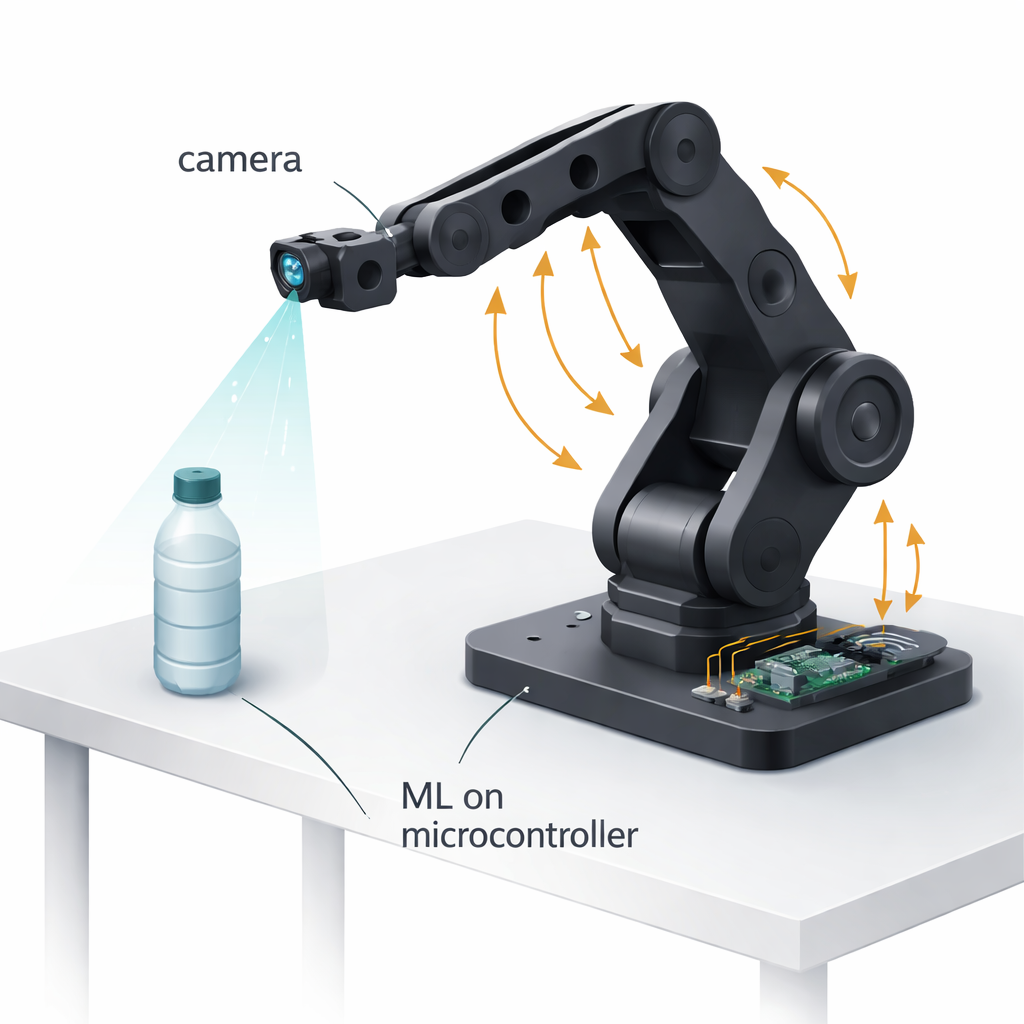
تعتمد الروبوتات الصناعية التقليدية غالبًا على حواسيب خارجية قوية للتعرف على الأشياء وتخطيط الحركات. هذا يضيف تكلفة وأسلاك وتعقيدًا تقنيًا، مما قد يكون حاجزًا أمام الشركات الصغيرة والمتوسطة. هدف الباحثون إثبات أن متحكمًا دقيقًا واحدًا وغير مكلف يمكنه القيام تقريبًا بكل شيء: رؤية الأشياء، وتحديد مواقعها في فضاء ثلاثي الأبعاد، وتخطيط حركة الذراع، وتشغيل المحركات التي تنفذ المهمة. من خلال إبقاء المعالجة على اللوحة نفسها، يصبح النظام أكثر قابلية للنقل وأكثر كفاءة في استهلاك الطاقة وأسهل في النشر في بيئات ضيقة أو متغيرة، من المصانع الصغيرة إلى مختبرات التعليم.
ذراع مرن يبنى بنفسه
صمم الفريق ذراع روبوت بستة مفاصل من الأساس باستخدام أجزاء بلاستيكية مطبوعة ثلاثية الأبعاد في الغالب للحفاظ على خفّتها وتكلفتها المنخفضة. تحرك محركات سيرفو هواية عالية العزم كل مفصل، وقام الباحثون بتعديل هذه المحركات لقراءة زواياها الدقيقة في الوقت الحقيقي، مما يتيح تحكمًا مغلق الحلقة بدقة. يشتمل ملقط ثنائي الأصابع مخصص عند الطرف على حساس تيار بسيط: من خلال مراقبة مقدار التيار الكهربائي الذي يسحبه محرك الملقط، يمكن للنظام استنتاج مدى قوة القبضة وتعديلها تلقائيًا ليمسك بالأجسام بقوة دون سحقها أو إسقاطها. مركبة على "المعصم" كاميرا صغيرة بدقة كاملة تتحرك مع الذراع، مما يمنح النظام رؤية من منظور أول للمشهد أمام الملقط.
تعليم شريحة صغيرة رؤية الزجاجات
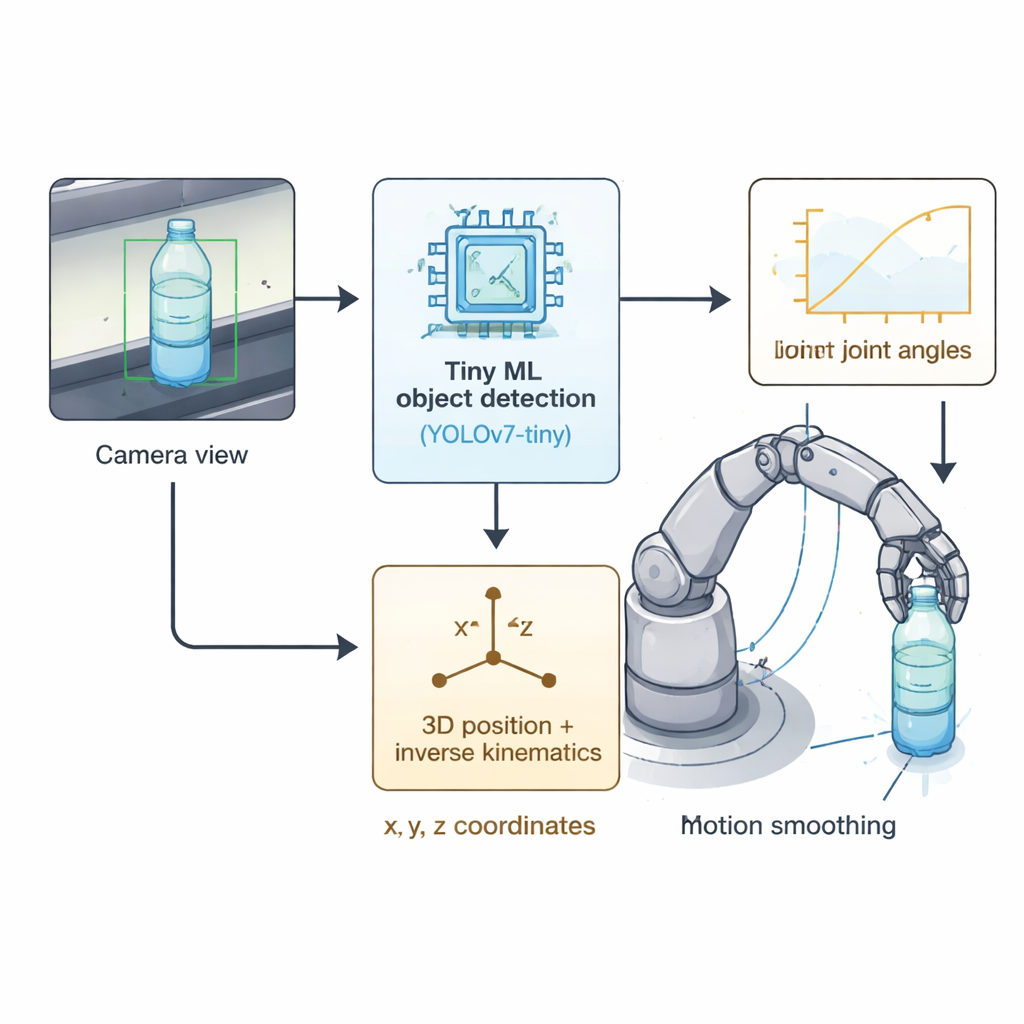
في قلب رؤية النظام يوجد نسخة مدمجة من شبكة اكتشاف الأشياء الشهيرة المسماة YOLOv7-tiny. درّب الباحثون هذا النموذج على أكثر من 2500 صورة لزجاجات مياه بلاستيكية التقطت في نطاق واسع من زوايا الإضاءة والمسافات والاعتراضات الجزئية. بعد التدريب على بطاقة رسومية قوية، ضغطوا النموذج إلى شكل "تعلم آلي مصغر" بتمثيل 8-بت ليتناسب مع الذاكرة والقدرة الحسابية المحدودة لمتحكم AMB82-Mini. حتى في هذا الشكل المخفف، حقق النموذج حوالي 88% دقة في اكتشاف الزجاجات وعمل بسرعة كافية—حوالي 7–8 إطارات في الثانية—لأداء مهام الالتقاط والوضع في الوقت الحقيقي مباشرة على المتحكم الدقيق، دون مساعدة من حاسوب شخصي أو السحابة.
من البكسلات إلى الحركة الدقيقة
بمجرد أن تلتقط الكاميرا زجاجة، يحسب النظام مركز صندوق الكشف في الصورة ويقدّر مدى بعد الجسم استنادًا إلى حجمه الظاهر بالبكسلات. هذا ينتج إحداثيات x وy وz في الفضاء. ثم يترجم محلل رياضي مخصص تلك الإحداثيات إلى زوايا المفاصل الست التي يجب أن تصل إليها الذراع، باستخدام هندسة روبوت قياسية لكن محسّنة لتعمل بسرعة على المعالج الصغير. ينظم برنامج التحكم عمل النظام كآلة حالات بسيطة تتوالى في العثور على جسم، والتحرك نحوه، وإغلاق الملقط باستخدام حساس التيار كحاسة ملامسة، ثم نقل الجسم إلى نقطة إسقاط ثابتة. للحفاظ على سلاسة الحركة وتجنب الاهتزاز، يستخدم الفريق منحنيات تخفيف حركة مصممة بعناية وطريقة خاصة لتعديل الجهد تقلل من اهتزاز المحركات وتجاوز الإشارة.
اختبارات العالم الحقيقي وما تكشفه
في تجارب متكررة، أظهر النظام المتكامل أنه قادر على التقاط ووضع زجاجات بلاستيكية تزن حتى 300 غرام بمعدل نجاح 100%، ولا يزال يؤدي جيدًا عند أحمال أثقل تصل إلى 500 غرام. أظهرت المحاكاة والقياسات أن أخطاء التموضع كانت عادةً حوالي مليمتر واحد—دقة كافية للعديد من مهام الفرز والتعبئة. بالمقارنة مع مخططات التحكم الأساسية، قلّلت استراتيجية التحكم في المحركات لدى المؤلفين الاهتزاز، واختصرت زمن استقرار الذراع في الموضع، وأزالت السلوك المتقطع. بينما ركزت الاختبارات على نوع واحد من الأجسام ومسافات ثابتة في ظروف داخلية مضبوطة، فإنها تقدم دليلًا مقنعًا على أن إدراك الروبوت والتحكم الجديين يمكن حشوهما في لوحة مدمجة متواضعة جدًا.
ماذا يعني هذا للأتمتة اليومية
بالنسبة لغير المتخصصين، الخلاصة الأساسية هي أن قدرات "الرؤية" و"الحركة" المتقدمة لم تعد محصورة في روبوتات باهظة الثمن وعالية الطاقة. من خلال الجمع بين نماذج تعلم آلي مصغرة، وهندسة ذكية، وتحكم دقيق في المحركات على متحكم دقيق منخفض التكلفة، تبيّن هذه الدراسة طريقًا نحو أذرع روبوتية مدمجة ومستقلة يمكن للمصنعين الصغار والمدارس والهواة تبنيها عمليًا. ومع توسع الإصدارات المستقبلية لتشمل أنواعًا أكثر من الأجسام وبيئات أكثر تنوعًا، قد تؤتمت أنظمة مضمنة مماثلة بصمت العديد من مهام الالتقاط والوضع البسيطة، لتقرب الروبوتات الذكية من عدد أكبر من الناس والأماكن.
الاستشهاد: Almaliki, H.H., Mazinan, A.H. & Modaresi, S.M. Design and implementation of a 6-DoF robot arm control with object detection based on machine learning using mini microcontroller. Sci Rep 16, 6842 (2026). https://doi.org/10.1038/s41598-026-35508-3
الكلمات المفتاحية: الروبوتات المضمنة, تعلم الآلة الصغير, تحكم ذراع الروبوت, اكتشاف الأشياء, الأتمتة الصناعية