Clear Sky Science · ar
التحكم الانزلاقي الضبابي القائم على خوارزمية اللفّ الفائق لأنظمة تاكاغي-سوجنو الوصفية
جعل الأنظمة المعقدة تتصرف بانتظام
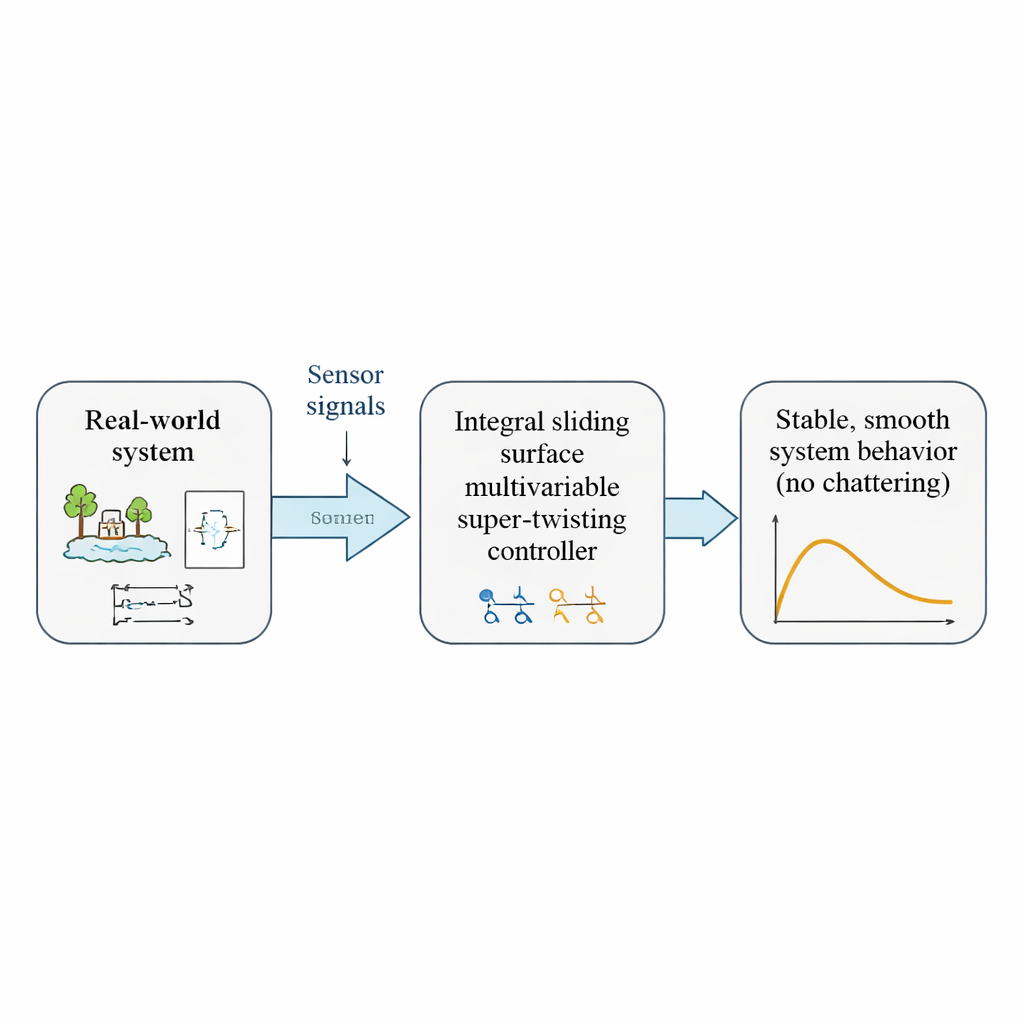
من إدارة مجموعات الأسماك إلى الحفاظ على استقرار شبكات الكهرباء والدوائر الإلكترونية، تتصرف العديد من الأنظمة الواقعية بطرق معقدة وغير خطية. يستخدم المهندسون خوارزميات تحكم متقدمة للحفاظ على أمان وكفاءة هذه الأنظمة حتى عندما تتعرض لاضطرابات وعدم يقين. تقدم هذه الورقة استراتيجية تحكم جديدة تروض هذه الأنظمة الفوضوية بشكل أكثر نعومة، متجنبة التبديل الحاد والسريع الذي قد يتلف المعدات ويقلل الأداء.
لماذا بعض الأنظمة صعبة التحكم
تحكم العديد من الأنظمة العملية ليس فقط بمعادلات تصف كيف تتغير الكميات عبر الزمن، بل أيضاً بقيود جبرية يجب أن تتحقق في كل لحظة. تظهر هذه الأنظمة الوصفية في الاقتصاد وشبكات الطاقة والوصلات الميكانيكية والنماذج البيولوجية. للتعامل مع سلوكها غير الخطي، يلجأ الباحثون غالباً إلى نماذج تاكاغي–سوجنو الضبابية، التي تمثل النظام المعقد كمزيج من أجزاء خطية أبسط صالحة في مناطق تشغيل مختلفة. ورغم قوتها، عانت هذه الإطارات طويلاً من عقبة فنية: معظم طرق التحكم افترضت معرفة مسبقة بكيفية تغير دوال العضوية الضبابية عبر الزمن، مع أن هذه التغيرات تعتمد فعلاً على سلوك النظام والمتحكم المستقبلي غير المعروف.
نوع أكثر نعومة من التحكم المتين
التحكم الانزلاقي طريقة متينة شائعة معروفة بقدرتها على إجبار النظام بسرعة على اتباع المسار المرغوب والحفاظ عليه رغم الاضطرابات. تعمل عن طريق تبديل إشارة التحكم لمواجهة عدم اليقين. ومع ذلك، قد يسبب هذا التبديل السريع «الاهتزاز» — تذبذبات ترددية عالية غير مرغوب فيها أو ضارة في الأنظمة الميكانيكية والإلكترونية. تخفي خوارزمية اللفّ الفائق، وهي شكل متقدم من التحكم الانزلاقي، التبديل داخل عملية داخلية، منتجة إشارة تحكم مستمرة تحافظ على المتانة مع تقليل الاهتزاز. حتى الآن، كانت هذه التقنية مقتصرة أساساً على الأنظمة ذات المدخل الأحادي أو استلزمت تفكيك الأنظمة متعددة المداخل إلى كثير من المتحكمات المنفصلة، وهو ما يمثل عبئاً حسابياً كبيراً.
سطح انزلاقي جديد دون افتراضات خفية
المساهمة الأساسية الأولى للمؤلفين هي نوع جديد من السطح الانزلاقي «التكاملي» المصمم خصيصاً لأنظمة تاكاغي–سوجنو الوصفية. ببساطة، هذا السطح هو شرط رياضي يشمل كل من السلوك الحاضر والمتراكم الماضي للنظام. من خلال بنائه بذكاء، يوضح المؤلفون أنه يمكنهم ضمان الحركة المطلوبة بمجرد أن يكون النظام على هذا السطح، دون الحاجة إلى حدود مسبقة حول كيفية تغير دوال العضوية الضبابية. هذا يزيل افتراضاً تقييدياً قيد الطرق السابقة. يستخدم التحليل دوال طاقة مختارة بعناية لإثبات أن سلوك النظام على السطح الانزلاقي يبقى مستقرًا مع مرور الزمن.
متحكم لفّ فائق متعدد المتغيرات
استناداً إلى هذا السطح الانزلاقي، تطور الورقة نسخة متعددة المتغيرات من خوارزمية اللفّ الفائق. بدلاً من تصميم متحكم واحد لكل مدخل أو لكل متغير انزلاقي، تتعامل الطريقة مع كلها معًا بشكل مصفوفي. هذا يجعلها أكثر ملاءمة للأنظمة التي ترتبط حالاتها بقوة، مثل الأنواع المتداخلة في نظام بيئي أو التيارات والجهود في دائرة كهربائية. يستنتج المؤلفون شروط اختيار مكاسب المتحكم بحيث تصل حالات النظام إلى السطح الانزلاقي فورًا ثم تتقارب في زمن نهائي محدود. وبما أن إشارة التحكم مستمرة وليس بها تبديل حاد، فليس هناك اهتزاز مصمم عليه، بينما يحافظ الأسلوب على المتانة تجاه الاضطرابات.
إثبات الفكرة في البيولوجيا والإلكترونيات
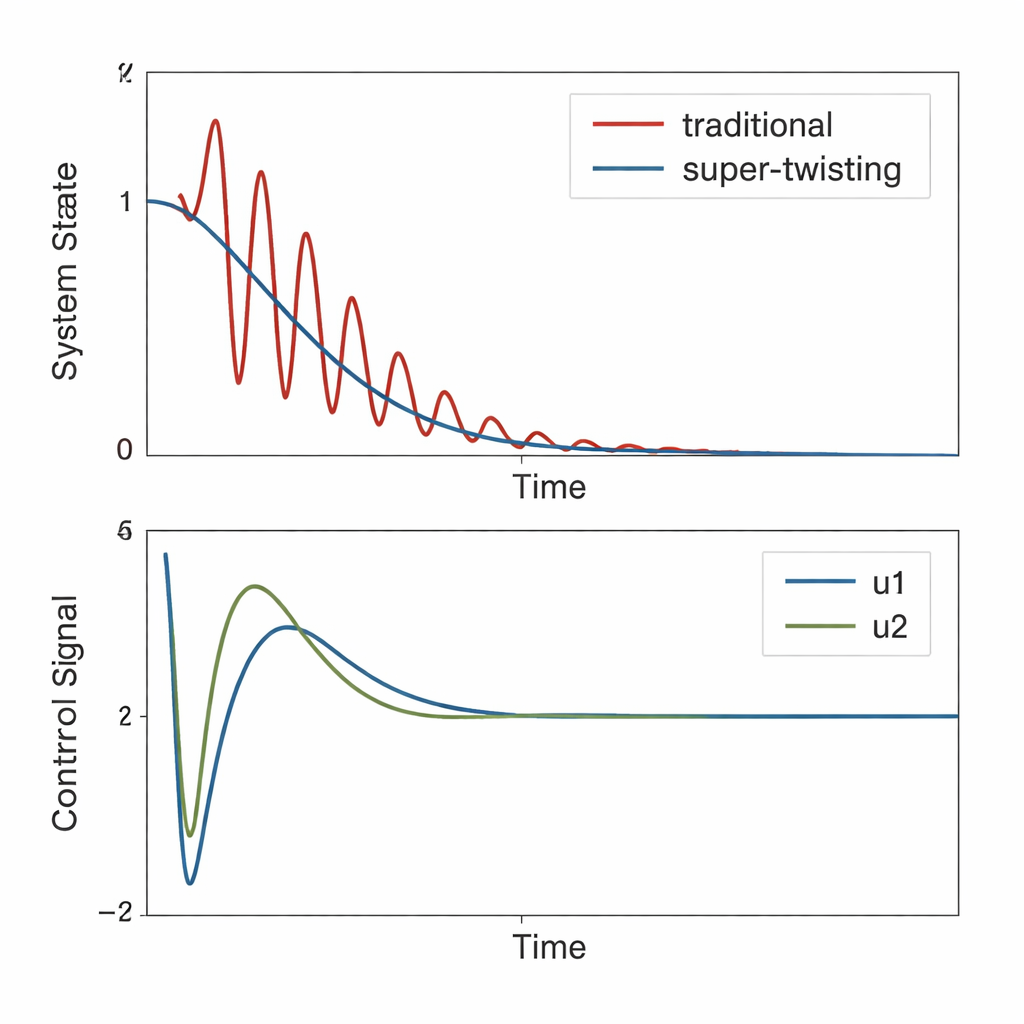
لإظهار جدوى طريقتهم، يطبق المؤلفون النهج على نظامين وصفيين غير خطيين مختلفين. الأول يصوّر سيناريو حيوي-اقتصادي يشمل جماعات غير ناضجة وناضجة من نوع ما، إلى جانب متغير يعكس القدرة التناسلية وإجراءات الإدارة مثل الصيد والتنظيم. المثال الثاني هو دائرة ثُنْبية نفقية غير خطية، وهي منصة اختبار كلاسيكية في الإلكترونيات. في كلتا الحالتين، تُظهر المحاكاة أن المتحكم المقترح يثبت حالات النظام بسرعة ويحافظ على المتغيرات الانزلاقية بالقرب من الصفر، مما يدل على تتبّع دقيق للسلوك المرغوب. بالمقارنة مع متحكمات الحالة الانزلاقية التقليدية، تقلل المقاربة الجديدة بشكل ملحوظ التذبذبات في كل من استجابة النظام وإشارات التحكم.
ماذا يعني هذا عملياً
لغير المتخصصين، الرسالة الأساسية هي أن هذا العمل يقدم وسيلة للحفاظ على الأنظمة المعقدة والمقيدة وغير المؤكدة تحت السيطرة دون التبديل العنيف الذي راقَبته بعض طرق المتانة. من خلال الجمع بين النمذجة الضبابية، وسطح انزلاقي تكاملي، وخوارزمية لفّ فائق متعددة المتغيرات، يصمم المؤلفون متحكمات مضمونة رياضياً من حيث الاستقرار وأكثر نعومة عملياً في التشغيل. قد يفيد هذا تطبيقات تتراوح من إدارة الموارد البيئية إلى إلكترونيات القوة المتقدمة وأنظمة التحكم المترابطة، خاصة مع استمرار العمل المستقبلي على توسيع هذه الأفكار لتشمل بيئات آمنة سيبرانياً حيث قد تنقطع الاتصالات نتيجة هجمات.
الاستشهاد: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
الكلمات المفتاحية: التحكم الانزلاقي, الأنظمة الضبابية, التحكم المتين, الديناميكا غير الخطية, خوارزمية اللفّ الفائق