Clear Sky Science · ar
متحكم تكيفي مرجعي قوي لمحرّك آلي مسطح ثلاثي درجات الحرية
أذرع روبوتية أذكى لمهام أصعب
أذرع الروبوت في المصانع سريعة ودقيقة للغاية، لكن أدائها يمكن أن يتدهور عندما يتصرّف العالم الحقيقي بشكل غير متوقع — تغيّر الأحمال، وضع أجزاء بشكل مختلف قليلاً، أو قوى مفاجئة تهز الذراع. تبحث هذه الورقة في نهج جديد للحفاظ على دقة وثبات ذراع روبوت شائع ذو ثلاثة مفاصل حتى عندما يكون من الصعب نمذجته بدقة وعندما تكون هناك اضطرابات قوية، مما يجعل الروبوتات شركاء أكثر موثوقية في بيئة المصنع.
لماذا أهمية الثلاثة مفاصل في المصانع الحقيقية
تركز الدراسة على روبوت مسطح مكوّن من ثلاثة روابط: ثلاث قطع جامدة متصلة بمفاصل دورانية وتتحرك في مستوى مسطح. على الرغم من بساطته، فإن هذا التصميم يشكل العمود الفقري للعديد من مهام الالتقاط والإيداع الصناعية، وخطوط التعبئة، وأنظمة التجميع. التحدي هو أن حركة مفصل واحد تؤثر بشدة على الآخرين، والمعادلات التي تصف حركة الذراع غير خطية للغاية ومترابطة بإحكام. يمكن للمتحكمات التقليدية أن تعمل جيداً عندما يكون كل شيء معروفاً ويمكن التنبؤ به، لكنها تواجه صعوبة عندما يتغير حمل الروبوت، أو عندما لا تُنمذَج الاحتكاكات أو الكتل بدقة، أو عندما تدفع اضطرابات خارجية الذراع عن مسارها.
تفكيك حركة معقدة إلى قطع أبسط
للتعامل مع هذه التعقيدات، يستخرج المؤلفون أولاً نموذجاً رياضياً مفصلاً لحركة الروبوت، بما في ذلك كيفية تداخل كتل الروابط وزوايا المفاصل والجاذبية لإحداث الحركة. ثم يقدمون تبسيطاً رئيسياً: استراتيجية «فك الترابط». بدلاً من معاملة الروبوت كنظام ثلاثي مفاصل متشابك، يُموذج كل مفصل كما لو أن تسارعه يعتمد أساساً على عزم محركه وسرعته الخاصين. تُجمَع التأثيرات المتبقية — مثل التداخلات بين المفاصل، مصطلحات الجاذبية، والتأثيرات الصعبة النمذجة — وتُعامل كشكوك. يتيح هذا الفك تقسيم مشكلة التحكم إلى ثلاث أنظمة فرعية أصغر وأكثر قابلية للإدارة، واحد لكل مفصل، مع الاعتراف في الوقت نفسه بأن النظام الحقيقي معقّد من الداخل. 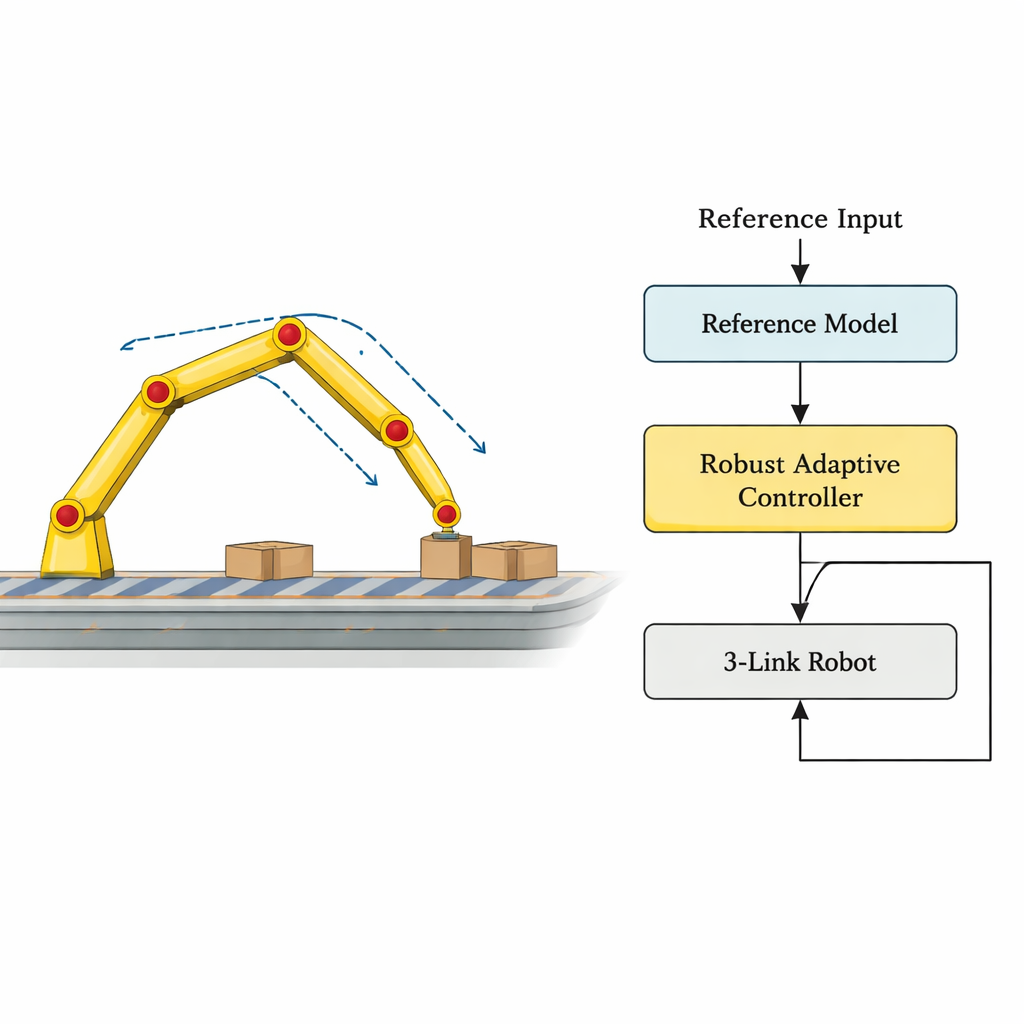
تعليم الروبوت اتباع هدف متحرك
بناءً على هذا النموذج المبسّط، يبني المؤلفون متحكماً تكيفياً مرجعياً (MRAC). ببساطة، يحددون أولاً استجابة مثالية — نموذج مرجعي يصف كيف ينبغي لكل مفصل أن يتحرك مع مرور الوقت عند إعطاء أمر. يقارن المتحكم باستمرار حركة الروبوت الفعلية بهذه المثالية ويعدّل معاملات الضبط داخلياً في الزمن الحقيقي لتقليل الفرق. في ظروف مثالية، يمكن لمتحكم MRAC التقليدي أن يجعل الروبوت يتبع المرجع عن كثب، لكن له نقطة ضعف خطيرة: في وجود اضطرابات مستمرة أو أخطاء في النمذجة، قد تنجرف معاملات التكيّف إلى قيم متطرفة، ما يؤدي إلى تذبذبات، وإهدار للطاقة، وحتى فقدان الاستقرار. تُسمى هذه الظاهرة انجراف المعلمات، وهي تجعل MRAC العادي محفوفاً بالمخاطر للاستخدام الصناعي الحقيقي.
جعل التكيف قوياً بدلاً من متهوّر
لتفادي هذا الانجراف، تطوّر الورقة عدة أشكال «قوية» من MRAC تأخذ التأثيرات المجهولة بعين الاعتبار صراحة. يضيف المؤلفون مصطلحات إضافية لقوانين التكيف تسحب بلطف معاملات المتحكم نحو حدود آمنة أو تضبط جهداً التكيف اعتماداً على مقدار خطأ التتبع. من بين الاستراتيجيات المختبرة — المعروفة بتعديل سيغما، وتعديل الخطأ، وتعديل التحكم الأمثل الواعي للطاقة — يبرز الأخير. من خلال محاكاة حاسوبية واسعة، بما في ذلك مسارات تذبذبية سريعة، وحركات التقاط وإيداع، وتغيّرات كتلة بنسبة 50 في المئة، وإضافات حمولة مفاجئة، واضطرابات قوية عالية التردد، يحافظ MRAC القوي على خطأ تتبّع صغير وإشارات تحكم سلسة. في سيناريوهات تنمو فيها معاملات MRAC التقليدي داخلياً بلا حدود، تحافظ النسخ القوية على سلوك جيد وحركة ثابتة للذراع. 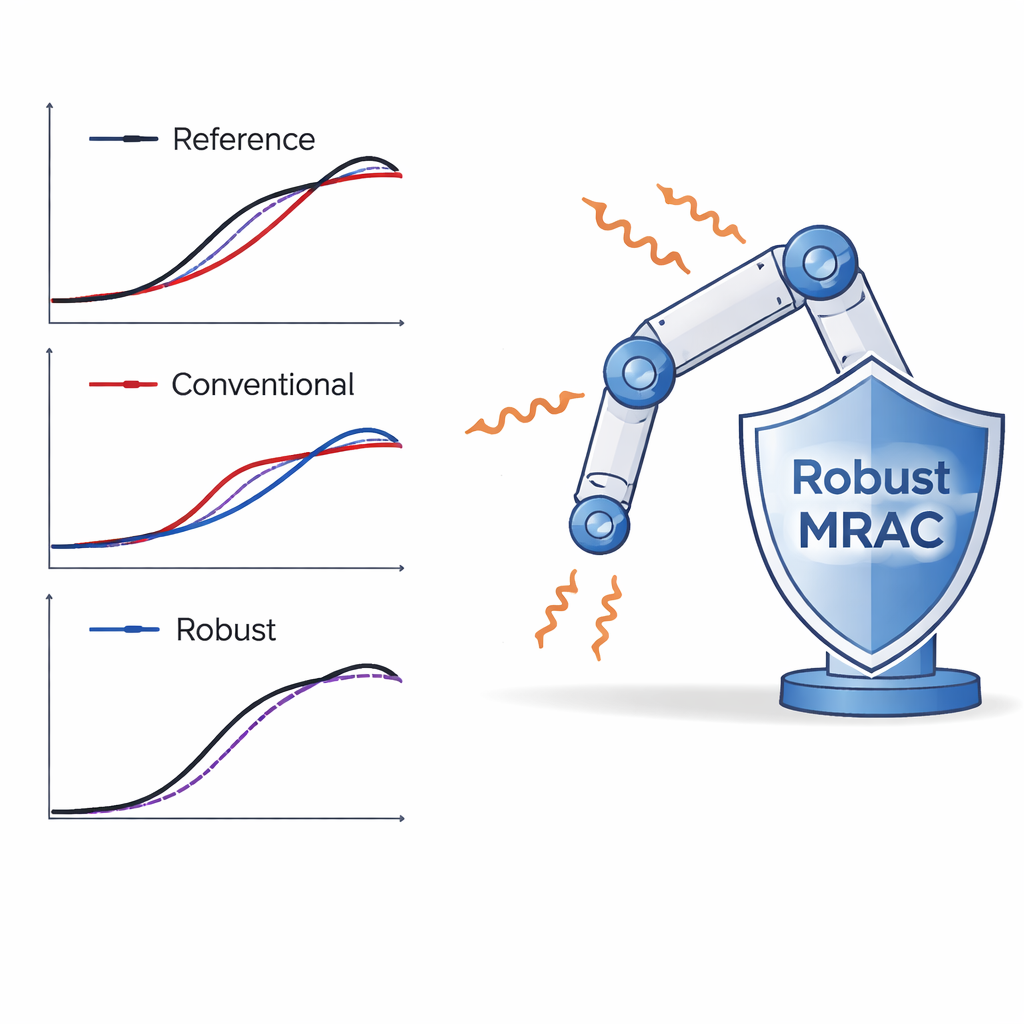
ما يعنيه هذا للروبوتات في العالم الحقيقي
للقارئ غير المتخصص، الخلاصة أن هذا العمل يقدم «طياراً آلياً» أذكى لأذرع الروبوت الصناعية — واحد يستمر في التعلم والتكيف، لكن من دون أن يصبح غير مستقر عندما تتغير البيئة أو الحمولة. من خلال تقسيم ديناميات الثلاثة مفاصل المعقدة إلى أجزاء أبسط وإضافة ضوابط أمانية لعملية التعلم، يسمح المتحكم التكيفي القوي المقترح للروبوت باتباع المسارات المطلوبة بدقة وبجهد محرك معقول، حتى في ظل الاضطرابات وعدم اليقين. يقرب هذا العمل الروبوتات العملية خطوة نحو أنظمة قابلة للتوصيل والتشغيل فعلياً يمكن إعادة تكليفها بسرعة، والتعامل مع ظروف غير متوقعة، والعمل بأمان بجانب البشر دون الحاجة إلى إعادة ضبط مستمرة من الخبراء.
الاستشهاد: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
الكلمات المفتاحية: تحكم في المحرّكات الروبوتية, التحكم التكيفي, الروبوتات الصناعية, تتبع المسار, التحكم القوي