Clear Sky Science · ar
خوارزمية تحسين هجينة لحل مسائل تخطيط المسار تعتمد على خوارزمية تحسين الذئب الرمادي
مسارات أذكى في المدن المزدحمة
يواجه السائقون، وسيارات التوصيل، والروبوتات كل يوم نفس التحدي: كيف تصل من النقطة أ إلى النقطة ب بسرعة وأمان ودون إهدار للوقود أو الوقت؟ تقدم هذه الورقة طريقة حاسوبية جديدة تخطط لمسارات أقصر وأكثر سلاسة عبر شبكات شوارع معقدة مليئة بالعقبات والازدحام. من خلال استعارة أفكار من طريقة صيد الذئاب الرمادية في مجموعات ومن أساليب المنقبين عن الذهب، يوضح المؤلفون كيف يمكن توجيه المركبات والروبوتات بكفاءة أكبر خلال البيئات الحضرية المزدحمة.
لماذا أهمية المسارات الأفضل
مع نمو المدن وتكاثف الحركة المرورية، يمكن للتحسينات الصغيرة في التوجيه أن تتحول إلى وفورات كبيرة في الزمن والطاقة والتلوث. تعمل طرق البحث التقليدية جيدًا عندما تكون الخريطة بسيطة، لكنها غالبًا ما تبطئ أو تعلق عندما تكون البيئة مليئة بالتفرعات والحواجز. تحاول أساليب البحث «الذكية» الحديثة تقليد الطبيعة—مثل أسراب الطيور أو مستعمرات النمل—لاستكشاف خيارات كثيرة في آن واحد والوقوف على حلول جيدة. إحدى هذه الطرق، المسماة خوارزمية تحسين الذئب الرمادي، اكتسبت شعبية لأنها بسيطة ومرنة، لكنها لا تزال تعاني من ثلاث مشكلات رئيسية: قد تعلق على حلول من الدرجة الثانية، قد تتقارب مبكرًا جدًا، ولا تبحث دائمًا الخريطة بأكملها بشكلٍ شامل.
مزج الذئاب، الفوضى ومنقبي الذهب
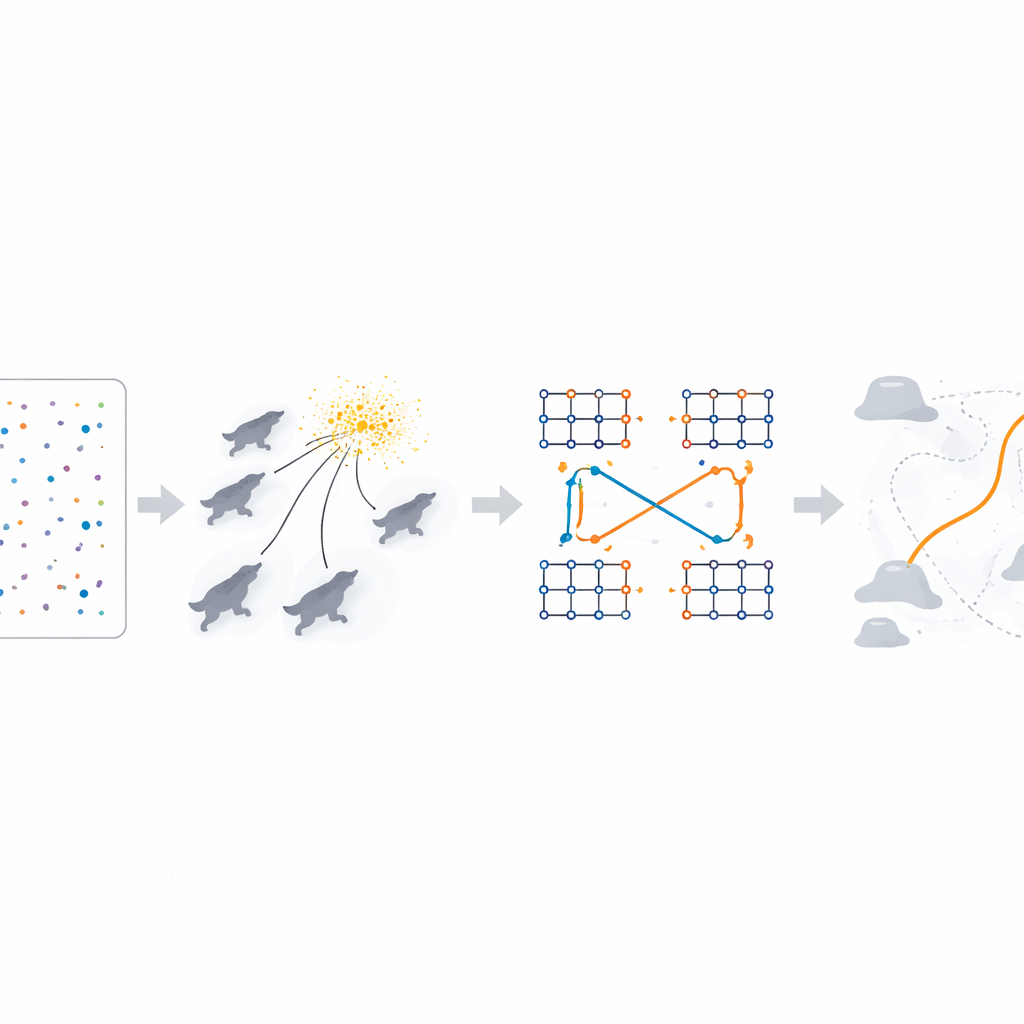
لتجاوز هذه الضعف، صمم المؤلفون نسخة محسّنة سموها CGGWO. تحتفظ بالفكرة الأساسية لقطيع ذئاب رمادية افتراضي يبحث عن أفضل مسار، لكنها تغيّر طريقة انتشار القطيع وتعلّمه. أولًا، بدلًا من وضع الذئاب في نقاط بداية عشوائية، تستخدم الطريقة خدعة رياضية تسمى التعيين الفوضوي (الخارطي) لتوزيعها بشكل أكثر تساوٍ عبر منطقة البحث. يزيد ذلك من احتمال أن يكتشف بعض الذئاب مناطق واعدة على الخريطة. بعد ذلك، تستعير الطريقة قاعدة من تقنية أخرى مستوحاة من منقبي الذهب: يتم دفع الذئب القيادي «الألفا» نحو مناطق غنية بشكل خاص في فضاء البحث، مثلما يتجه المنقبون تدريجيًا نحو مناطق تحتوي على ذهب أكثر. هذه الخطوة تضخ عشوائية محكومة وتنوّعًا يساعد القطيع على الهروب من الخيارات المحلية الضعيفة.
تقاطعات ذكية وهزّات لطيفة
تضيف CGGWO بعد ذلك نوعين من حركات «التقاطع» التي تعيد ترتيب المعلومات بين الذئاب. في الحركة الأفقية، يتبادل مساران مرشحان أجزاءً من طرقهما، مما يقلص النقاط العمياء ويشجع البحث على تغطية الخريطة بشكل أكثر اكتمالًا. في الحركة العمودية، تختلط أجزاء مختلفة داخل مسار واحد، ما يمكن أن يحيي أجزاء راكدة من الحل ويمنع القطيع من التجمّد مبكرًا على مسار معيب. أخيرًا، جرعة خفيفة من الطفرة الغاوسية—دفعات عشوائية صغيرة موجهة بحسب أداء كل ذئب—تبقي القطيع في طور الاستكشاف. إذا كان مسار ذئب أسوأ من المعدل، يتلقى هزة أقوى، مما يساعد المجموعة كلها على تجنّب الوقوع في زاوية واحدة من فضاء الحلول.
اختبار الطريقة الجديدة
يختبر الباحثون أولًا CGGWO على 23 مسألة معيارية رياضية تُستخدم على نطاق واسع لتقييم خوارزميات البحث. تتراوح هذه المسائل من مناظر سلسة ذات قمة وحيدة إلى تضاريس وعرة مليئة بنقاط منخفضة محلية عديدة. عبر معظم هذه الاختبارات، تجد CGGWO حلولًا أفضل، وتتقارب بسرعة أكبر، وتظهر سلوكًا أكثر استقرارًا مقارنة بعدد من المنافسين المعروفين، بما في ذلك خوارزمية الذئب الرمادي الأصلية، وتحسين سرب الجسيمات، والخوارزميات الجينية. ثم يتجه الفريق إلى مسألة تخطيط مسار واقعية مبنية على شبكة شوارع مبسطة بالقرب من منطقة تجارية مزدحمة في لاسا. تمثل العقبات أجزاء محجوبة أو مزدحمة، والهدف هو ربط نقطة بداية ونقطة نهاية بمسار قصير وسلس يتجنبها.
رحلات أقصر وأكثر سلاسة
في اختبار على نمط المرور، تنتج CGGWO باستمرار مسارات أقصر مع عدد أقل من الانعطافات الحادة مقارنة بالطرق الأخرى مع حاجة لمقدار معتدل من وقت الحوسبة. بالمقارنة مع خوارزمية الذئب الرمادي الأصلية وعدة تقنيات منافسة، كانت المسارات المخططة أكثر استقامة وأسهل في المتابعة، مخفضةً المسافة بما يصل إلى نحو ربعها في بعض المقارنات. للقراء غير المتخصصين، الخلاصة واضحة: من خلال الجمع بذكاء بين أفكار الفوضى، والصيد الجماعي، والتنقيب عن الذهب، تبحث الطريقة الجديدة الخرائط بمزيد من الشمول وتقاوم الانحشار عند حلول «جيدة بما يكفي» فقط. هذا يجعلها أداة واعدة لأنظمة الملاحة المستقبلية، وروبوتات التوصيل، وغيرها من الآلات الذكية التي يجب أن تجد بسرعة مسارات آمنة وفعالة عبر المتاهات المكتظة والمتغيرة للمدن الحديثة.
الاستشهاد: Cheng, G., Liu, Y. Hybrid optimization algorithm for solving path planning problems based on grey wolf optimization algorithm. Sci Rep 16, 8479 (2026). https://doi.org/10.1038/s41598-026-35037-z
الكلمات المفتاحية: تخطيط المسار, خوارزمية التحسين, النقل الذكي, ذكاء السرب, ملاحة الروبوت