Clear Sky Science · ar
تحديد نقاط نمو النبات عبر تقليل الأسبقية المرتكز على الحقبات
إزالة الحشائش بذكاء لعالم جائع
مع تزايد السكان العالمي، يتعرض المزارعون لضغوط لإنتاج المزيد من الغذاء مع تقليل استخدام المواد الكيميائية وحماية البيئة. أحد التحديات الرئيسية هو التخلص من الحشائش دون الإضرار بالمحاصيل القيمة. يقدم هذا المقال استراتيجية تدريب جديدة للذكاء الاصطناعي تساعد الآلات على تحديد مكان نمو النبات بدقة — نقاط نموه — بحيث يمكن لأدوات مثل أجهزة إزالة الحشائش بالليزر أو الكهرباء استهداف الحشائش بدقة جراحية وترك المحاصيل سالمة.
لماذا تهمّ نقاط النمو
تسرق الحشائش ضوء الشمس والماء والمغذيات من المحاصيل، مما يقلل الغلات ويهدد الأمن الغذائي. يعتمد المزارعون غالبًا على المبيدات العشبية، لكن الإفراط في استخدامها يثير مخاوف صحية وبيئية ويؤدي إلى ظهور حشائش مقاومة. تَعِدُ تقنيات جديدة مثل الإزالة بالهبّ، والكهرباء، والليزر بتحكّم أنظف عبر تدمير النباتات ميكانيكياً أو بطرق طاقية. للعمل بأمان، يجب على هذه الأنظمة التمييز بين المحاصيل والحشائش ثم تحديد نقاط النمو الصغيرة — التي كثيراً ما تكون عند ملتقي السيقان — حيث يكون الإضرار أكثر فعالية. يمكن للعديد من أدوات الرؤية الحاسوبية الحالية كشف النباتات بأكملها، لكنها تكافح للعثور على هذه الأهداف الصغيرة بدقة وسرعة كافيتين للاستخدام في الوقت الحقيقي بالميدان.
تحويل دلائل لونية بسيطة إلى إرشاد قوي
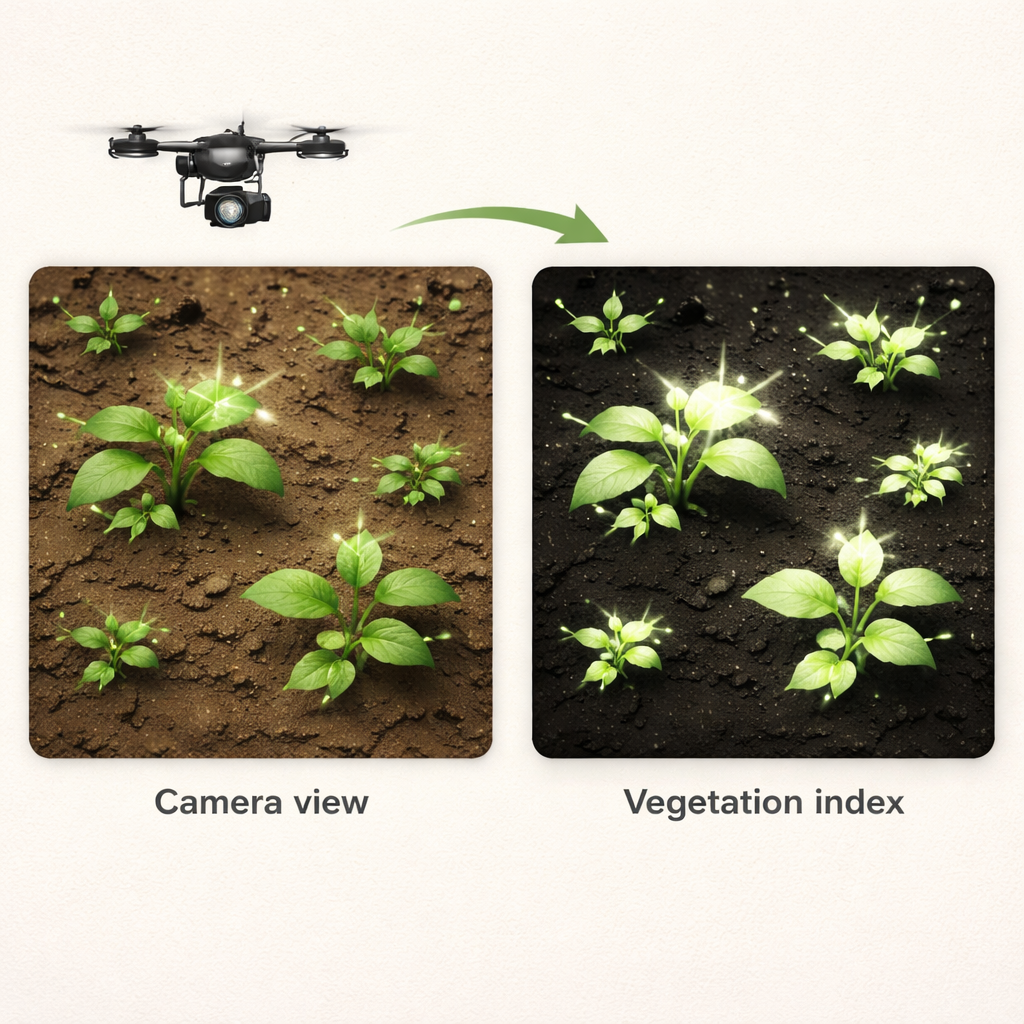
يبني الباحثون على فكرة بسيطة: تبدو النباتات الخضراء مختلفة عن التربة البنية في الصور الملونة العادية. تُعطي صيغة لونية معروفة، تُدعى مؤشر الغطاء النباتي ExG-ExR، توليفة من قيم الأحمر والأخضر والأزرق لكل بكسل بحيث تبرز بكسلات النبات كأجزاء فاتحة وتظهر بكسلات التربة داكنة. يمكن حساب هذا المؤشر من أي كاميرا عادية دون مستشعرات إضافية. في النظام الجديد، يُضاف هذا المؤشر كقناة رابعة إلى القنوات الثلاث اللونية المعتادة كمدخل إلى كاشف ذكاء اصطناعي شائع يعرف باسم YOLO-Pose. تمنح هذه الرؤية ذات القنوات الأربع النموذج صورة أوضح عن أماكن النباتات، مما يساعده على التركيز على المناطق الصحيحة عند البحث عن نقاط النمو.
تعليم الذكاء الاصطناعي من السهل إلى الصعب
إضافة معلومات إضافية وحدها لا تكفي؛ يجب أن يتعلم النموذج أيضاً كيفية استخدامها. يقدّم الفريق استراتيجية «تقليل الأسبقية المرتكز على الحقبات» (EPA)، المستوحاة من طريقة تعلم البشر. في بدايات التدريب، يتم تشجيع النموذج بقوة على إبقاء نقاط النمو المتوقعة داخل مناطق النبات، باستخدام مؤشر الغطاء النباتي كمرشد. إذا وضع نقطة على التربة، يفرض خوارزم التدريب عقوبة أشد؛ وإذا كانت النقطة ضمن بكسلات النبات فالعقوبة أخف. ومع تقدم التدريب، يتم تخفيف هذا التوجيه تدريجياً وفق جدول سلس، مما يسمح للنموذج بالاعتماد أقل على الدليل اللوني الخشن وأكثر على الأنماط المرئية الدقيقة التي تعلّمها. وبالنهاية، لا يعود الذكاء الاصطناعي مجبراً على التوجه نحو أكثر البكسلات خضرة — والتي قد لا تكون نقاط النمو الحقيقية — بل يصقل مواقعها بنفسه.
إثبات الفكرة في الحقول الحقيقية
لاختبار نهجهم، درّب المؤلفون نماذج على مجموعتي بيانات ميدانية احتوَتَا على آلاف الصور الحقلية مع أنواع محاصيل متعددة وأنواع عديدة من الحشائش. قارنوا نسخاً من نموذج YOLO-Pose مع القناة النباتية الإضافية وبدونها ومع استراتيجية التدريب EPA وبدونها. أضافت إضافة مؤشر الغطاء النباتي وحده مكاسب متواضعة، لكن الجمع بينه وبين EPA أدى إلى تحسّن واضح في دقة تحديد نقاط النمو — حوالي 2.4 نقطة مئوية في مقياس كشف معياري — دون الإضرار بقدرة النموذج على رسم مربعات حول النباتات كاملة. كانت الحسابات الإضافية ضئيلة (أقل من نصف بالمئة من التكلفة الإجمالية)، ما يجعل الطريقة مناسبة لروبوتات المزارع ذات الموارد المحدودة. أظهرت الاختبارات عبر ظروف إضاءة مختلفة، ومستويات رطوبة للتربة متباينة، وحتى عبر إصدارات مختلفة من نماذج YOLO أن الاستراتيجية مفيدة على نطاق واسع، وإن كانت حساسة إلى حد ما لقوة ومدة تطبيق التوجيه المسبق.
ماذا يعني هذا للزراعة المستقبلية
لغير المتخصصين، الخلاصة هي أن تعديلاً بسيطاً في طريقة تدريب الذكاء الاصطناعي — باستخدام إشارة لونية بسيطة في البداية ثم السماح تدريجياً للنموذج بالتفكير بمفرده — يمكن أن يجعل الآلات أفضل بكثير في العثور على المواقع الدقيقة في النباتات حيث تكمن الأهمية. قد يساعد هذا التحسن في تحديد نقاط النمو الروبوتات المستقبلية على توجيه نبضات كهربائية أو حزم ليزر بدقة إلى الحشائش مع الحفاظ على المحاصيل، مما يقلل من استخدام المبيدات العشبية والأثر البيئي. ويمكن تكييف نفس الاستراتيجية مع أنواع أخرى من إشارات النبات ونماذج ذكاء اصطناعي مختلفة، فاتحة الباب لأنظمة رؤية أذكى وأكثر موثوقية تدعم زراعة مستدامة عالية الدقة.
الاستشهاد: Ma, C., Zhang, Z., Tian, F. et al. Plant growth point localization via epoch-based prior annealing. Sci Rep 16, 4994 (2026). https://doi.org/10.1038/s41598-026-35009-3
الكلمات المفتاحية: الزراعة الدقيقة, مكافحة الحشائش, رؤية حاسوبية, التعلّم العميق, نقاط نمو النبات