Clear Sky Science · ar
تجزئة دقيقة للكائنات تحت الماء في الوقت الفعلي باستخدام YOLOv11-UOS المحسن ثنائي النطاق مع تعزيز تكيفي موجه بالفيزياء وتعزيز بالانتباه
الغوص أعمق بأعين رقمية أكثر حدة
باتت محيطاتنا تُستكشف بشكل متزايد ليس فقط بواسطة الغواصين والغواصات، بل أيضاً بواسطة كاميرات ذكية محمولة على روبوتات تحت الماء. تساعد هذه الكاميرات في البحث عن حطام السفن، وفحص خطوط الأنابيب البحرية، ومراقبة الشعاب المرجانية وتج populations الأسماك. ومع ذلك، غالباً ما تكون الصور تحت الماء عكرة وذات صبغة زرقاء‑خضراء ومليئة بالتشويش البصري، ما يجعل من الصعب على البشر — ناهيك عن الحواسيب — تمييز الكائنات. يعرف هذا البحث نظام رؤية حاسوبية جديد ينظف صور تحت الماء ثم يكتشف ويخط حدود الكائنات فيها بسرعة كافية لتوجيه مهمات روبوتية في الوقت الحقيقي.
لماذا الرؤية تحت الماء صعبة جداً
يتصرف الضوء في الماء بشكل يختلف كثيراً عن الهواء. أثناء سفر ضوء الشمس للأسفل، تختفي النغمات الحمراء أولاً ثم الخضراء، مما يترك صبغة زرقاء ومشاهد باهتة ومنخفضة التباين. الجسيمات الدقيقة في الماء تشتت الضوء، محدثة ضباباً يُطمس الحواف ويخفي التفاصيل الدقيقة. برامج كشف الكائنات التقليدية، وحتى نماذج التعلم العميق الحديثة، تواجه صعوبات مع هذه الصور المشوهة: تندمج الأسماك مع المرجان، وتختفي الهياكل البشرية الصنع بالخلفية، وتصبح المشاهد ذات الإضاءة المنخفضة شبه غير قابلة للقراءة. عادة ما تعاملت الأبحاث السابقة إما مع تنظيف الصورة أو مع الكشف عن الكائنات بشكل منفصل، ما أدى غالباً إلى أن يكون النظام النهائي بطيئاً جداً أو هشاً أو لا يرى جيداً في المياه العكرة للغاية.
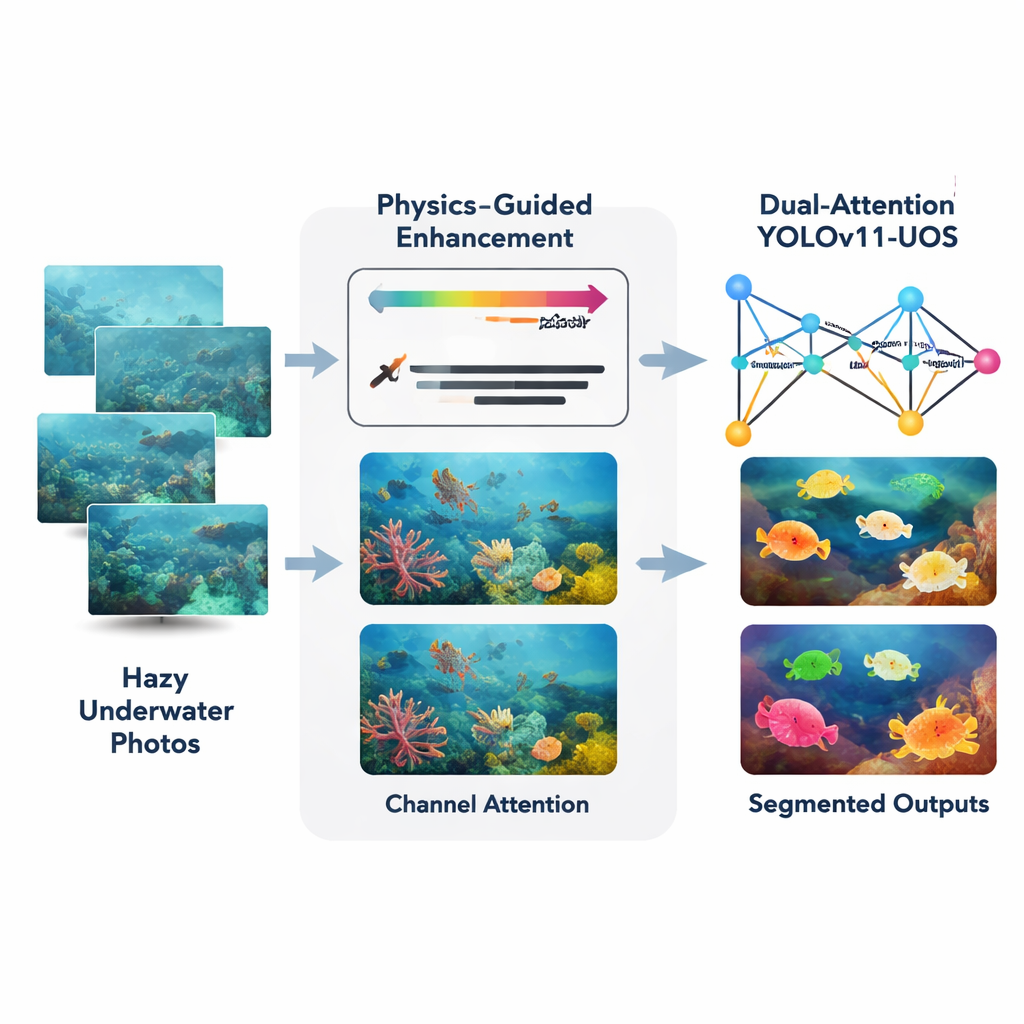
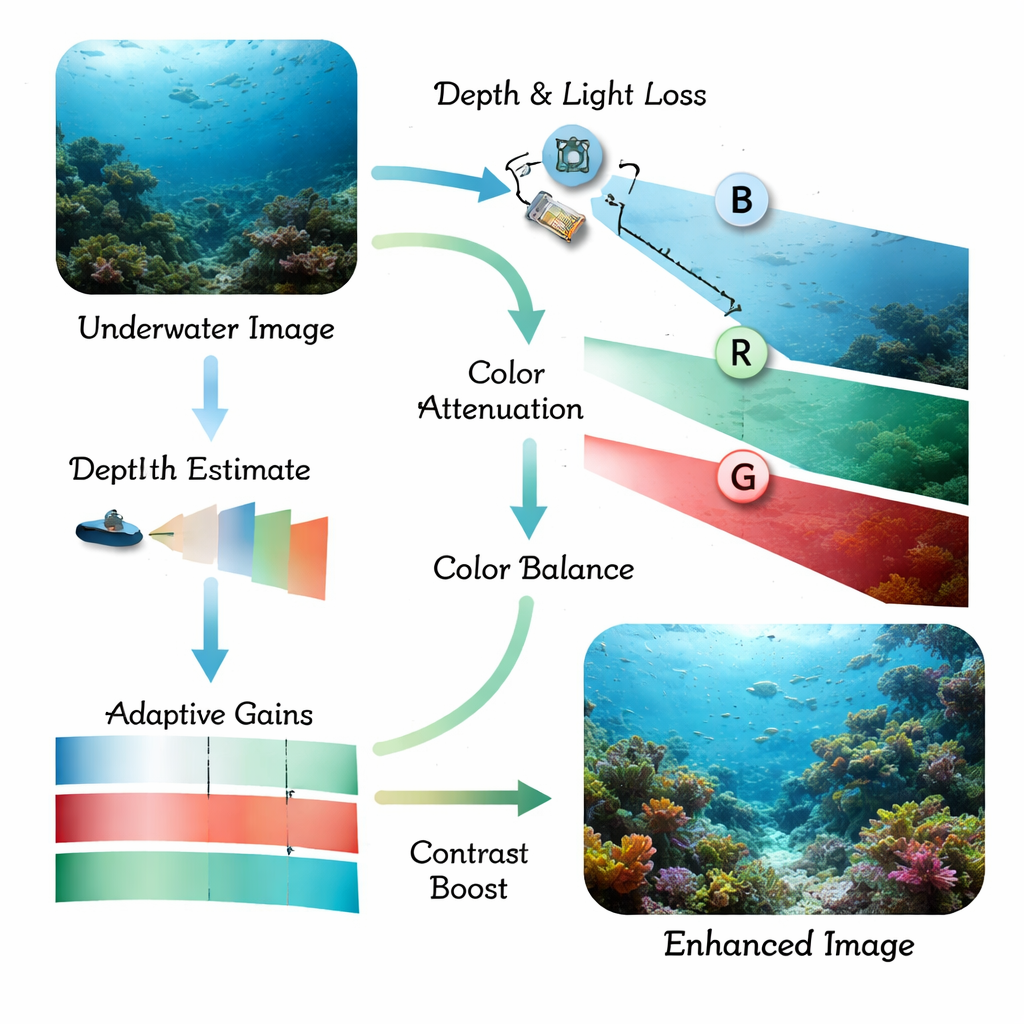
استراتيجية من خطوتين: نظف أولاً، ثم ركّز
يقترح المؤلفون نهجاً مشتركاً مبنياً حول كاشف زمني حديث يدعى YOLOv11، مُخصّص هنا لمشاهد تحت الماء وتجزيء الحالات (رسم محيط دقيق لكل كائن). أولاً، وحدة أمامية تسمى التعزيز التكيفي الموجه بالفيزياء تستقبل الصور الخام تحت الماء وتصححها باستخدام نموذج فيزيائي مبسط لكيفية امتصاص وتشتت الضوء في الماء. تُقدّر الوحدة بعد ذلك مدى بعد كل جزء من المشهد عن الكاميرا، ثم تعوّض الفقدان الأقوى للضوء الأحمر مقارنة بالأخضر والأزرق. هذا يستعيد ألواناً أكثر طبيعية ويعزز التباين المحلي، بينما خطوة دقيقة قائمة على المدرج التكراري تُشَدِّد الحواف دون تضخيم الضوضاء، حتى في المناطق المظلمة أو العكرة.
تعليم الشبكة أين تنظر
بعد تنظيف الصورة، تُمرّر إلى العمود الفقري لـ YOLOv11 المطوَّر والمزوَّد بآليات انتباه. تتصرف هذه الوحدات المضافة قليلاً مثل بقعة ضوء ومرشح لوني. يخبر الانتباه الفراغي الشبكة بأن تولي مزيداً من الاهتمام للمناطق المهمة — مثل محيط سمكة أو حافة قطعة أثرية غارقة — وتجاهل الخلفية المشتتة مثل الرمال أو النباتات المتمايلة. ويضبط انتباه القناة مدى وزن النظام لأنماط الألوان والملمس المختلفة، بحيث تُبرز الإشارات البصرية المفيدة بينما تُخمد غير ذات الصلة. معاً، تساعد هاتان المرحلتان المزدوجتان من الانتباه الشبكة على بناء تمثيلات داخلية أكثر وضوحاً قبل أن تقرر مكان الكائنات وما هي.
الاختبار في محيطات حقيقية وظروف قاسية
لاختبار مدى فعالية النظام عملياً، درّبه الباحثون واختبروه على عدة مجموعات صور تحت الماء عامة بالإضافة إلى مجموعة بيانات مخصصة جديدة تضم أكثر من 7000 صورة مُعنونة بعناية من مياه ساحلية بعمق وغموض متغيرين. قاسوا درجات الكشف والتجزئة القياسية وقارنوا طريقتهم بنماذج مستخدمة على نطاق واسع مثل U‑Net وDeepLab ومجزئات قائمة على المحولات، ونظام YOLOv11 الأساس بدون الوحدات الجديدة. حسّن التصميم المجمّع للتعزيز زائد الانتباه دقة الكشف المتوسطة بحوالي 6.5 نقطة مئوية مقارنةً بنموذج YOLOv11 القاعدي، مع خطوط كائن أنظف ملحوظاً وعدد أقل من الكائنات المفقودة أو المكتشفة زوراً. والأهم أن النظام لا يزال يعمل عند نحو 38 إطاراً في الثانية على معالج رسومي حديث، بسرعة كافية للاستخدام شبه الفوري على منصات روبوتية.
ماذا يعني هذا للروبوتات البحرية والبحث العلمي
بعبارة بسيطة، تُظهر الدراسة أن المعالجة المسبقة الذكية والانتباه المركّز تمكّن الحواسيب من «الرؤية» بشكل أفضل بكثير تحت الماء. من خلال التراجع أولاً عن بعض التأثيرات الفيزيائية التي تفسد صور تحت الماء ثم توجيه شبكة الكشف للتركيز على المناطق والألوان الأكثر معلوماتية، تقدم الطريقة محيطات أوضح وحدوداً أكثر موثوقية للأسماك والمرجان والهياكل البشرية الصنع. يمكن أن يساعد هذا المركبات تحت المياه الذاتية على التنقل بأمان، ومراقبة النظم البيئية البحرية الحساسة، وفحص البنية التحتية البحرية الحيوية دون إشراف بشري. لا تزال التحديات قائمة في المياه الطينية للغاية أو في المشاهد العميقة التي تفتقد الضوء الأحمر بشدة، لكن الإطار يقدم خطوة عملية نحو رؤية تحت مائية قوية في الوقت الحقيقي يمكن أن تدعم رسم خرائط ثلاثي الأبعاد واستكشاف متعدد الحساسات للمحيط في المستقبل.
الاستشهاد: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. An accurate realtime underwater object segmentation using improved dual-domain YOLOv11-UOS with physics guided adaptive enhancement and attention-boosting. Sci Rep 16, 4804 (2026). https://doi.org/10.1038/s41598-026-35001-x
الكلمات المفتاحية: رؤية تحت الماء, الروبوتات البحرية, تحسين الصور, تجزئة الكائنات, رؤية الحاسوب