Clear Sky Science · ar
مستشعر تصوير رباعي الأبعاد متماسك واسع النطاق
رؤية العالم في أربعة أبعاد
تعتمد السيارات ذاتية القيادة والطائرات بدون طيار للتوصيل ونظارات الواقع المعزز على آلات قادرة على فهم العالم الثلاثي الأبعاد حولها في الزمن الحقيقي. اليوم، غالبًا ما تكون هذه الرؤية مرهقةٍ في الحجم أو باهظة التكلفة أو مستهلكة للطاقة. تناقش هذه الورقة خطوة كبيرة نحو «كاميرا رباعية الأبعاد» — مستشعر بحجم شريحة لا يرسم شكلاً لمشهدٍ ثلاثي الأبعاد فحسب، بل يقيس أيضًا حركة العناصر، مما قد يتيح رؤية آلية مدمجة لكل شيء من الروبوتات إلى الهواتف الذكية.
من الصور المسطحة إلى خرائط حية
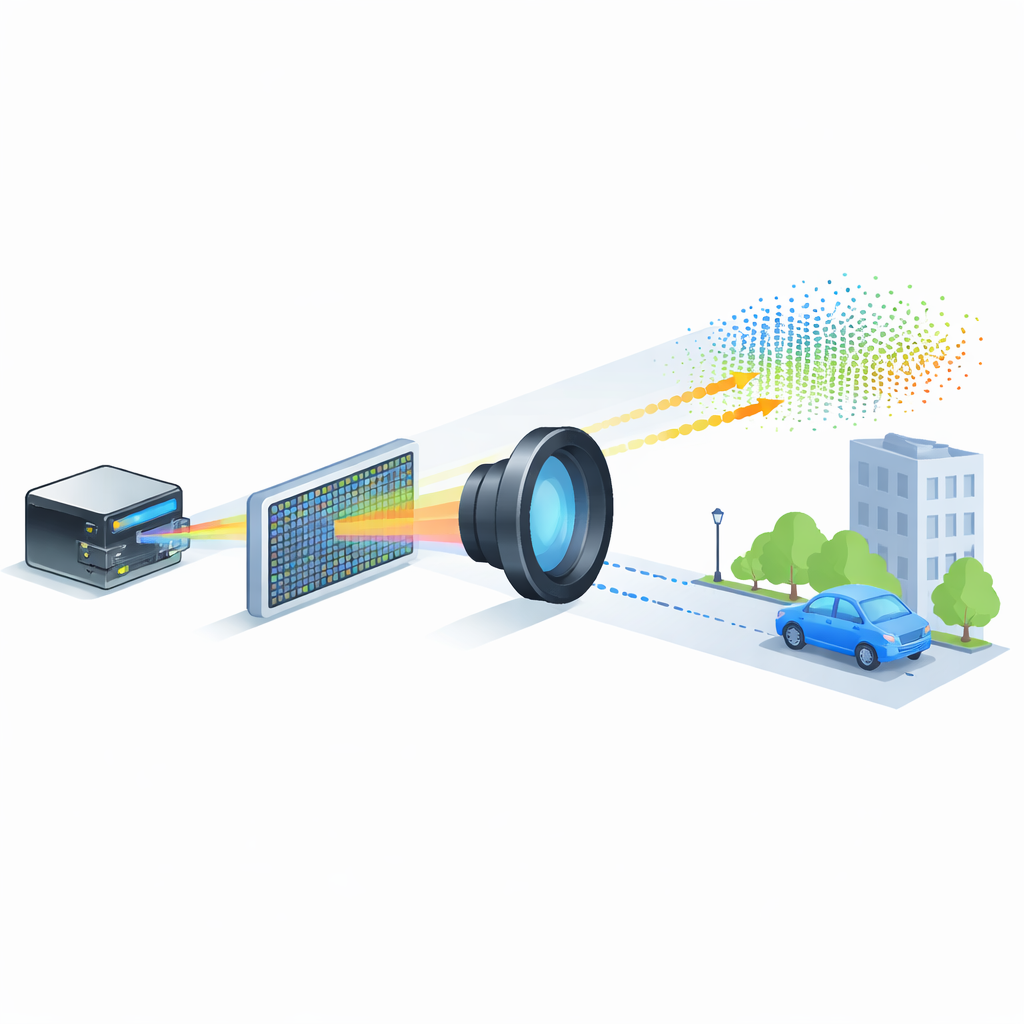
تلتقط الكاميرات التقليدية كثافة الضوء على سطح مسطح، منتِجةً صوراً ثنائية الأبعاد جميلة لكنها لا تعطي معلومات مباشرة عن المسافة. بالمقابل، ترسل أنظمة قياس المدى بالضوء (لايدار) نبضات ليزر وتُحسب مدة عودتها، فتُنشئ خريطة ثلاثية الأبعاد للمحيط. تتيح الأساليب الحالية رؤية بعيدة وبتفاصيل عالية، لكنها عادةً ما تتطلب أجزاء متحركة أو عدسات كبيرة أو طاقة عالية لكل نقطة مقاسة. وهذا يصعب من بناء جهاز صغير ورخيص وصلب مثل كاميرا الهاتف الذكي، ومع ذلك قادر على مسح الشوارع والمواقع الصناعية أو الغرف المزدحمة بدقة كبيرة وبأمان.
شريحة تقيس المسافة والحركة
يعرض الباحثون نوعًا جديدًا من مصفوفة الطائرة البؤرية للّيدار — أي نسخة لايدار من شريحة التصوير داخل الكاميرا الرقمية. تحتوي أجهزتهم على 352 في 176 بكسل، بما مجموعه أكثر من 60,000 موقع استشعاري، كلها مبنية على شريحة واحدة من الفوتونيكس على السيليكون مع إلكترونيات التحكم الخاصة بها. بدلاً من استخدام نبضات ليزر قصيرة، يعتمد النظام على ضوء مستمر مُعدّل التردد (FMCW)، حيث يُحرَّك لون الليزر في «صياح» مُتحكم به. عندما ينعكس الضوء عن الأجسام ويعود إلى الشريحة، يُدمج بتماسك مع شعاع مرجعي. تكشف الفوارق الطفيفة في التردد عن بعد كل نقطة ومدى سرعتها في الاقتراب أو الابتعاد عن المستشعر، مضيفةً السرعة كبعد رابع مقاس.
كيف يعمل شبك الضوء الصغير
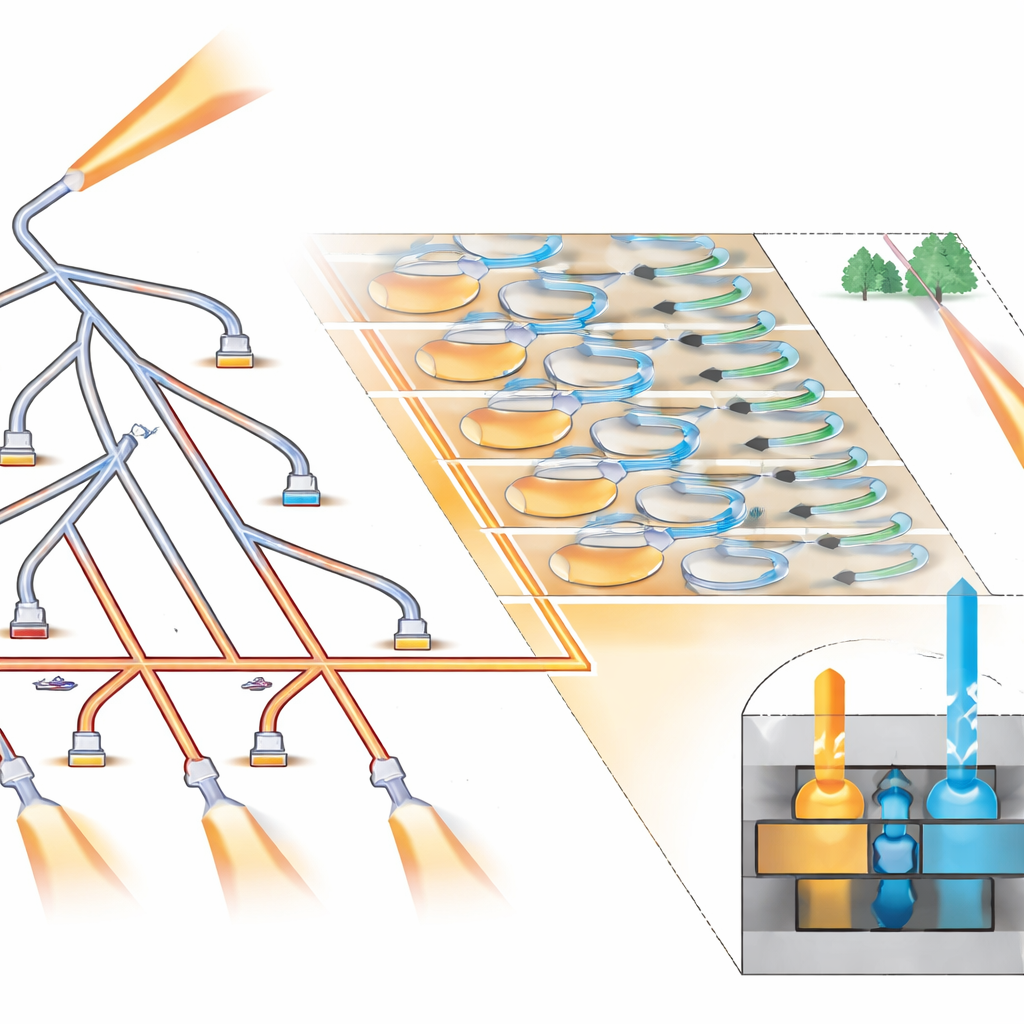
لتغطية عدد كبير من البكسلات دون هدر للطاقة، توجه الشريحة ضوء الليزر المُصياح عبر شجرة من مفاتيح بصرية صغيرة، موجهةً إياه بالتتابع إلى مجموعات من ثمانية بكسلات متجاورة. داخل كل مجموعة، يُقسَم الضوء بالتساوي بحيث تعمل الثمانية كمُرسِلات ومُستقبِلات في آنٍ واحد. يستخدم كل بكسل زوجًا من مُوصلات الشِبْك لإرسال وجمع الضوء، بالإضافة إلى زوج من الكواشف الضوئية المتوازنة ومُكَبِّر على البكسل لاستخراج إشارة الضرب التي تُشفّر المسافة والسرعة. تُحسّن عدسات دقيقة مصممة خصيصًا ومُوضوعة مباشرة على الشريحة قدرة جمع وإرسال الضوء، معززةً الكفاءة. وبما أن نفس الفتحة ترسل وتستقبل الضوء (تصميم «منوستاتي»)، يتجنّب النظام التداخل العرضي بين البكسلات ويحتاج إلى عدسة تصوير خارجية واحدة فقط، تمامًا مثل الكاميرا العادية.
اختبار الكاميرا الرباعية الأبعاد
باستخدام عدسات بالأشعة تحت الحمراء القصيرة المتاحة تجاريًا، بنى الفريق وحدة شبيهة بالكاميرا حول الشريحة والتقط سحب نقاط ثلاثية الأبعاد مفصّلة لمشاهد داخلية وخارجية. باستخدام عدسة واحدة، حقق المستشعر مجال رؤية يقارب 33 في 19 درجة ودقة زاوية تصل إلى 0.06 درجة — كافية لتمييز الأثاث في مكتب وميزات معمارية على مبانٍ بعشرات الأمتار. قاس النظام أجسامًا من 4 إلى 65 مترًا باستخدام عشرات النانو جول من الطاقة الضوئية لكل نقطة وبمتوسط طاقة مستهدفة نحو 178 ميكروواط لكل بكسل، محافظًا على حدود سلامة العين الصارمة. كما تتبّع الحركة: في تجربة واحدة، قاس السرعة الشعاعية المتغيرة لقرص دوّار بدقة مليمتر/ثانية.
الأداء والحدود والنمو المستقبلي
تُظهر القياسات الدقيقة أن أداء المستشعر قريب من الحدود الفيزيائية الأساسية الموضوعة بطبيعة الضوء الكمومية، لكنه لم يصل إليها تمامًا بعد. اليوم، القيد الرئيسي هو الضوضاء الإلكترونية من المضخمات في كل بكسل، ما يقلل قليلًا نسبة الإشارة إلى الضوضاء مقارنة بكاشف مثالي محدود بالفوتونات فقط. يطرح المؤلفون تعديلات تصميم بسيطة — أساسًا رفع مستوى الضوء المرجعي الداخلي وتحسين التخطيط البصري، وربما استخدام مزيج من السيليكون ونتريد السيليكون — التي يمكن أن تدفع النظام إلى نطاق محدود بضوضاء الطلقات (shot-noise) فعليًا وتزيد النطاق القابل للاستخدام إلى ما يزيد عن 200 متر. كما أن نقل بعض المفاتيح على الشريحة خارج مصفوفة البكسلات سيزيل أيضًا فجوات صغيرة في التغطية بعيدة المجال، مما ينتج سحب نقاط أنظم أنظف.
نحو رؤية رباعية الأبعاد يومية
تُظهر هذه الدراسة مستشعر تصوير رباعي الأبعاد مدمجًا بالكامل ومضغوطًا ينافس عدد البكسلات والمدى الذي تطلبه العديد من التطبيقات الواقعية، مع إبقاء الطاقة والحجم تحت السيطرة. بدمج مصادر الضوء، والمستقبِلات، وتوجيه الحزمة وإلكترونيات التحكم على شريحة سيليكون واحدة، يلعب الجهاز دورًا مماثلاً لاستشعار CMOS في التصوير الرقمي بالنسبة لاستشعار العمق والحركة. مع تحسينات إضافية، قد تصبح مثل هذه المستشعرات رخيصة ومتانة كفاية لتُدمَج في السيارات والروبوتات والهواتف والنظارات، مانحةً الآلات فهمًا دقيقًا وفي الوقت الحقيقي للعالم الثلاثي الأبعاد وكيف يتغير لحظة بلحظة.
الاستشهاد: Settembrini, F.F., Gungor, A.C., Forrer, A. et al. A large-scale coherent 4D imaging sensor. Nature 651, 364–370 (2026). https://doi.org/10.1038/s41586-026-10183-6
الكلمات المفتاحية: لايدار, التصوير رباعي الأبعاد, الفوتونيكس على السيليكون, الأنظمة الذاتية, استشعار العمق