Clear Sky Science · ar
تصنيع ميداني قابل للتوسع لجِلْد إلكتروني متعدد الوسائط للروبوتات الذكية والأنظمة التفاعلية
منح الروبوتات والألعاب حاسة لمس
تخيل روبوتاً يمكنه حمل شريحة من الخبز المحمص الساخن برفق دون سحقها أو حرق يدك، أو لعبة تستجيب بشكل مختلف عندما تحتضنها أو تنثني أذنها أو تدفئها بكفّك. يصف هذا البحث نوعاً جديداً من «الجلد الإلكتروني» الذي يقرب مثل هذه الأفكار من الواقع من خلال تزويد الآلات بحاسة لمس وغنى بالمعلومات أشبه بالإنسان، وقابلية شعور بالمحيط القريب.
لماذا تحتاج الآلات إلى لمس أفضل
لا تزال روبوتات وأجهزة اليوم غير مرنة عند التعامل مع العالم الحقيقي. الكثير منها يستطيع الإحساس بشيء واحد فقط، مثل الضغط، وغالباً ما يعتمد على أجزاء ضخمة ومجمَّعة يدوياً يصعب توسيعها. بينما يقوم جلد الإنسان بدمج إشارات متعددة باستمرار: لمسة خفيفة، ضغط قوي، استطالة، دفء، وحتى الإحساس بمدى قرب الأشياء قبل التلامس. هدف مؤلفو هذه الدراسة كان بناء نسخة إلكترونية من الجلد يمكنها التقاط عدة من هذه الأحاسيس في وقت واحد، مع أن تكون رقيقة ومرنة وسهلة التخصيص لمهام مختلفة.
بناء حاسة لمس رقيقة ومرنة
ابتكر الفريق «جلداً إلكترونياً» منخفض السماكة عبر عملية لا تتطلب غرفاً نظيفة، يمكن توسيعها وتكييفها بسرعة. في قلبه دائرة نحاسية مرنة منظّمة بنمط بواسطة ليزر فوق بنفسجي، تعمل مثل التوصيلات في لوحة الدائرة لكن يمكنها الانثناء والالتفاف حول الانحناءات. فوق وتحت هذه الدائرة أضافوا طبقة سيليكونية لينة مليئة بمسام هوائية دقيقة، شبيهة بالإسفنجة. تُطلى الأسطح الخارجية بغشاء رقيق من أنابيب الكربون النانوية، مكوِّنةً قشرة موصلة تحمِي الجهاز من الضوضاء الكهربائية وتعمل كطبقة مرجعية مشتركة للاستشعار. يتيح هذا التراكم لكل لوحة استشعار أن تتصرف كمكثف كهربائي صغير تتغير قيمته عند الضغط أو الانحناء أو التسخين أو الاقتراب من جسم. ركبوا أيضاً شُرائح صغيرة تقيس الحرارة والمسافة دون تلامس على نفس الدائرة المرنة، فتقلد الورقة بأكملها ليس فقط مستقبلات الضغط والاستطالة في الجلد، بل أيضاً حاسة الدفء والرؤية القريبة. 
كيف تشعر المستشعرات بالضغط والحركة
تم تصميم أجزاء الضغط والانحناء في الجلد الإلكتروني لتستجيب بقوة لتغيرات صغيرة مع البقاء متينة. عندما يضغط شيء ما، تنضغط المسام في الطبقة اللينة، فتبقى الطبقات المعدنية الداخلية أقرب إلى بعضها ويحل السيليكون محل الهواء. كلا التأثيرين يرفعان الإشارة الكهربائية، خصوصاً عند الضغوط المنخفضة حيث يسهل عصر المادة. أظهرت الاختبارات أن الجلد الإلكتروني يمكنه اكتشاف لمسات لطيفة جداً، حتى بضع عشرات من الباسكال، مع استجابة سريعة وانحراف ضئيل حتى بعد عشرات الآلاف من دورات الضغط والإفلات. عند انثناء الورقة، تطوى حول الأسلاك الداخلية، ما يقلص الفجوة بين الطبقات على جانب واحد ويعزز الإشارة. يزيد الاستجابة بشكل أكثر وضوحاً عند زوايا انحناء أكبر، فيتماشى ذلك مع كيفية تمركز الانحناءات في العالم الواقعي بدلاً من انتشارها بالتساوي. بشكل عام، يوازن التصميم بين النعومة والثبات والحساسية من دون هياكل مكدسة معقدة مستخدمة في أجهزة سابقة. 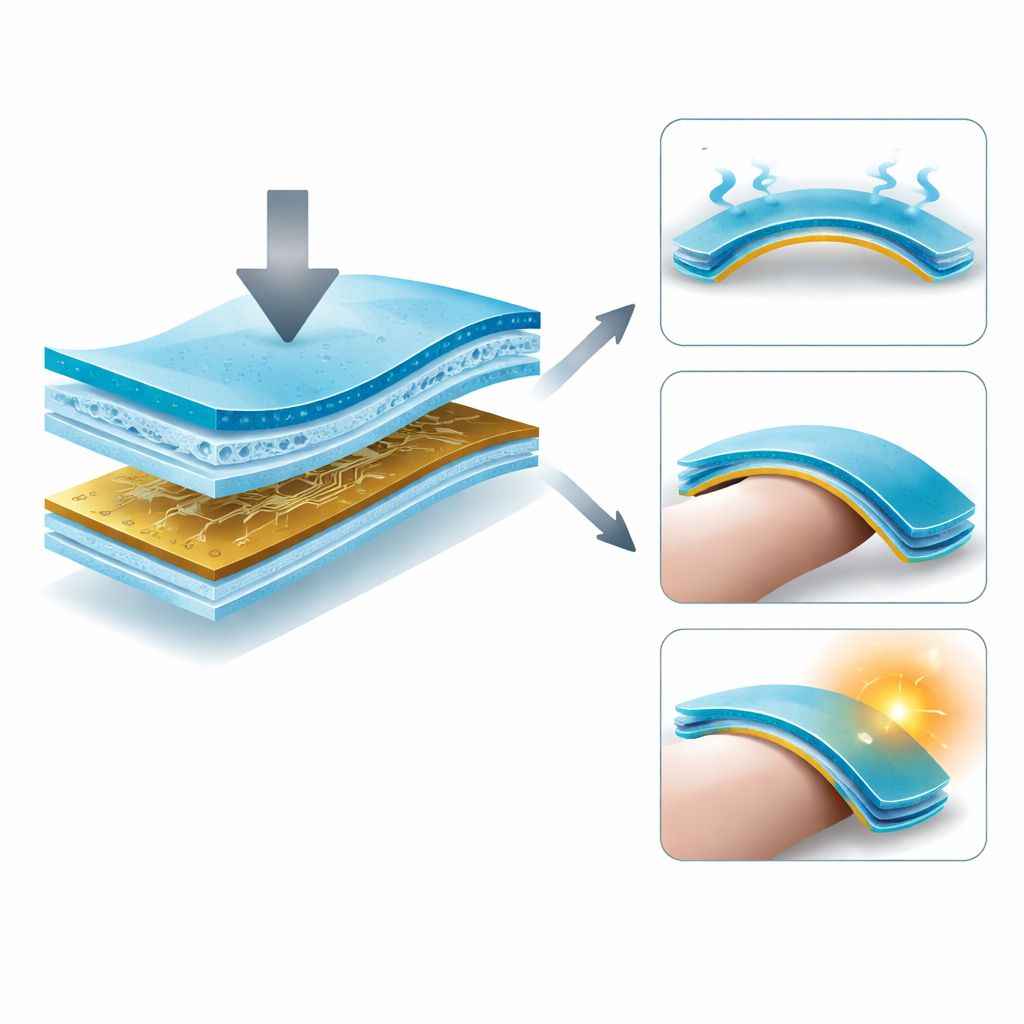
من روبوتات المطبخ إلى الرفاق اللعبية
لإظهار ما يستطيع هذا الجلد الإلكتروني فعله، لفّه الباحثون حول ممسك روبوتي وكلفوا الروبوت بمهمة طبخ. عندما يتحرك الممسك نحو قطعة خبز ساخنة، تقوم وحدة استشعار عمق صغيرة مدمجة في الجلد أولاً بتخطيط مدى بُعد الجسم، ما يساعد الروبوت على محاذاة أصابعه قبل التلامس. بمجرد التلامس، توجه مستشعرات الضغط والانحناء مدى قوة القبضة لتمنع الانزلاق أو سحق الخبز. يفحص مستشعر الحرارة على نفس الورقة متى برد الخبز بما يكفي لتمريره بأمان إلى شخص. في مثال آخر، بنى الفريق لعبة على شكل فيل ناعم مغطاة بالجلد الإلكتروني. الضغط على صدره يغير إيقاع محرك الاهتزاز المخفي ليشعر كنبض قلب، وانثناء أذنه يطلق الصوت، ودفء اليد يمكن أن يضيء وجنتي اللعبة، محولاً اللمس إلى تفاعل مرح وعاطفي.
رؤية نماذج الضغط عبر سطح
بعيداً عن النقاط الفردية، يمكن لنفس طريقة التصنيع تشكيل مصفوفات كبيرة لقياس الضغط تقرأ أين وبأي قوة يتم لمس السطح. عرض الفريق شبكة 8 في 15 تعمل مثل كاميرا ضغط: عندما تضغط الأصابع أو الأوزان أو الأشكال المطبوعة، يعيد النظام بناء نمط القوة وحتى يحدد مخططات مثل الحروف. قد تساعد القدرة على التقاط خرائط الضغط ومراكز الكتلة الروبوتات في موازنة الأحمال، والتعرّف على الأشياء، أو العمل كمنصات وزن ذكية وأس surfaces تفاعلية. وبما أن العملية الأساسية سريعة ووحدية، يمكن للمصممين ضبط حجم وبُعد ونعومة بكسلات الاستشعار لاستخدامات مختلفة، من الأثاث الذكي إلى حصائر مراقبة الوضعية.
ماذا يعني هذا للتقنية اليومية
من خلال دمج أوضاع استشعار متعددة—الضغط، والانحناء، والدفء، والقرب—في ورقة واحدة رقيقة وسهلة التخصيص، يقرب هذا العمل الجلد الإلكتروني من قدرات الجلد البشري الدقيقة. وبينما لا يزال هناك مجال لتحسين الأداء عند الضغوط العالية جداً ولأتمتة بعض خطوات التجميع، تُظهر المقاربة بالفعل أنه يمكن إضافة لمسة غنية إلى الروبوتات والألعاب وغيرها من الأجهزة من دون أجهزة يدوية ثقيلة. عملياً، قد يؤدي ذلك إلى روبوتات منزلية تتعامل مع الأشياء الهشة بأمان أكبر، وأجهزة قابلة للارتداء طبية تتعقب ملامسة الجسم براحة أكبر، ومنتجات تفاعلية تستجيب للمسنا بطرق أكثر طبيعية.
الاستشهاد: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
الكلمات المفتاحية: جلد إلكتروني, استشعار لمسي, مستشعرات مرنة, ممسك روبوتي, أجهزة تفاعلية