Clear Sky Science · ar
روبوت طائر شبيه باليد لأغراض الإمساك والتفاعل أثناء الطيران
مساعدون طائرون تكاد تصافحهم
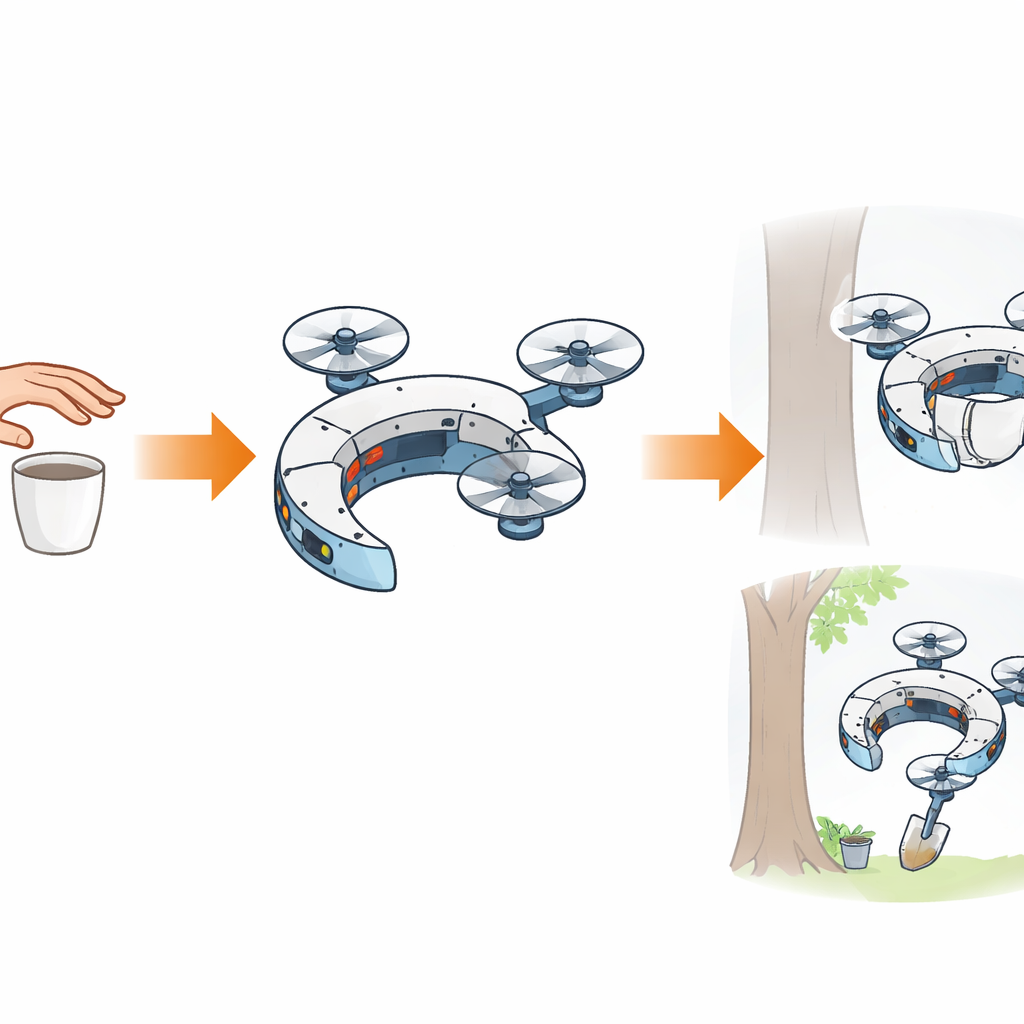
تخيل روبوتًا طائرًا صغيرًا لا يكتفي بتصوير محيطك فحسب، بل يمكنه أيضًا فتح باب أو تمرير مشروب لك أو انتزاع طرد من رف يصعب الوصول إليه. تقدّم هذه الدراسة جهازًا من هذا النوع بالضبط: طائرة صغيرة جسمها يعمل كيد. من خلال دمج أفكار مستلهمة من طيران الطيور وإمساك البشر، يُظهر الباحثون كيف يمكن للروبوتات الطائرة أن تتجاوز المراقبة الساكنة لتصبح مساعدين نشطين في المنازل والمصانع ومشاهد البحث والإنقاذ.
من كاميرات طائرة إلى أيدي طائرة
تعد معظم الطائرات بدون طيار اليوم «عيونًا طائرة» تُستخدم للتصوير والمسح أو التفتيش. عندما يحاول المهندسون إضافة أذرع روبوتية لتمكين الطائرات من الإمساك أو الدفع، تصبح الآلات بسرعة ضخمة وثقيلة وتستهلك طاقة كبيرة وتكون صعبة التحكم—خاصة داخل المباني أو بالقرب من الناس. يعالج المؤلفون هذه المشكلة عبر إعادة التفكير في جسم الطائرة نفسه. بدلاً من تركيب ذراع منفصل، صمموا الإطار بأكمله ليعمل كيد يمكنها الالتفاف حول الأشياء والتوازن على أعمدة أو أشجار، مع الاحتفاظ بقدرة الطيران الرشيق عبر المساحات الضيقة.
هيكل طائر على شكل يد
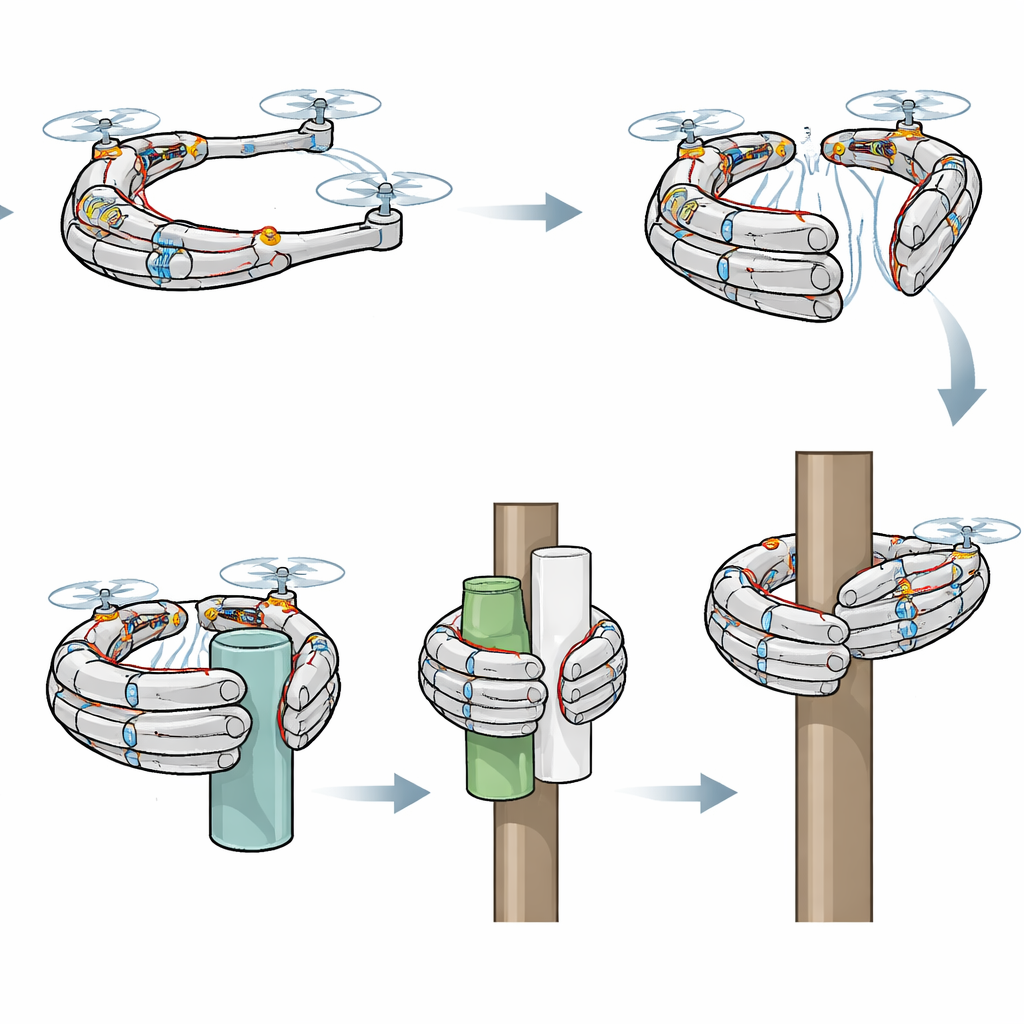
الروبوت الجديد، المسمى HI‑ARM، بحجم ووزن تقريبًا مع يد بالغ. يشكل إطاره شكلًا مفتوحًا على هيئة حرف C يشبه راحة معقوفة بأصابع. داخل هذا الحلق توجد مقاطع ملساء مفصلية وزوايا ملتفة قابلة للتمدد، لا تُحركها العديد من المحركات بل حبل وحيد يشبه الوتر تُشدّه سيرفو واحد. تسمح نوابض للجسم بالانحناء ثم العودة إلى شكله الأصلي، مخزِّنة ومطلِقةً الطاقة بطريقة تشبه العضلات والأوتار. يتيح هذا التصميم ناقص التشغيل للروبوت التكيف حول أجسام غير معروفة: مع شد الحبل، تضغط أجزاء مختلفة وتلتف حتى تتوافق طبيعيًا مع ما يتم الإمساك به.
كيف يفكر الطائر ويرتفع
لجعل هذا الجسم المتحول مفيدًا، يبني الفريق «دماغًا» طبقيًا للروبوت. جزء يخطط إلى أين يجب أن يطير الطائر ومتى يجب أن يمسك أو يفتح أو يستقر، مستعينًا بمكتبة من الحركات الأساسية مثل «امسك» و«أطلق» و«استقر على عمود». جزء آخر يترجم هذه الخطط إلى مسارات ناعمة في الفضاء يمكن للطائرة اتباعها في الزمن الحقيقي. ثم يقدّم نظام تحكم سريع تقديرات مستمرة لموضع الروبوت، وموقع مركز ثقله المتغير أثناء تشكله، والقوى الإضافية عند حمل أو دفع أشياء. تكتشف خوارزميات تكيفية هذه الاضطرابات وتزيد أو تعيد موازنة دفع المراوح الأربع تلقائيًا بحيث يظل الطيران مستقرًا حتى بينما يضغط الجسم على زجاجة أو يدفع بابًا.
ما الذي تستطيع هذه اليد الطائرة فعله
في اختبارات داخلية، ينفذ HI‑ARM حركات مألوفة شبيهة بالبشر. يستخدم «راحته» للإمساك وحمل زجاجة ماء ممتلئة على مسار طيران دقيق، و«أطراف أصابعه» لتقرص ورفع منديل رفيع مفرد—مهمة دقيقة خصيصًا للآلات. يتكيف نفس الآلية مع الألعاب والصناديق والحقائب والكتل ذات الأشكال الغريبة دون الحاجة لمعرفة أشكالها مقدمًا. يمكن للروبوت الاقتراب من جذع شجرة أو عمود، أن يثبت حوله، يوقف مراوحه، ويعلق ببساطة هناك، مستخدمًا طاقة أقل بكثير من التحويم. كما يمكنه الاقتراب من باب، أن يحيط بمقبضه، ويؤرجحه ليفتح الباب مع الحفاظ على توازنه رغم قوى الارتداد.
مساعدة الناس والعمل في الهواء الطلق
يستكشف الباحثون أيضًا كيف يمكن لمثل هذا الجهاز أن يتفاعل مع الناس. في مشهد شبيه بالمنزل، يأخذ الطائر طردًا من يد شخص، يضعه بعيدًا، يجلب مشروبًا من طاولة، يسلمه، يجمع لاحقًا الزجاجة الفارغة، وفي النهاية يستقر على علاقة معاطف انتظارًا للمهمة التالية—كل ذلك في تسلسل واحد مستمر وناعم. باستخدام نظارات فيديو ووحدة تحكم بسيطة بيد واحدة، يوجّه شخص محدود الحركة عن بُعد الروبوت لالتقاط كوب قهوة من الخارج وإعادته عبر مسافة عقود من الأمتار. في تجارب خارجية، يستقر الطائر على خيزران وأعمدة، يضغط عبر فتحة صخرية ضيقة عبر تقلص جسده، ويحمل مشروبًا عبر نهر، مشيرًا إلى أدوار محتملة في التوصيل والتفتيش والإنقاذ.
ما الذي يعنيه هذا لحياتنا اليومية
تُظهر الدراسة أن روبوتًا طائرًا صغيرًا على شكل يد يمكن أن يجمع بين طيران رشيق وطرق إمساك واستقرار وتفاعل مفاجئة الشبه بالبشر. من خلال تكامل وثيق بين تصميم الجسم وتخطيط الحركة والتحكم التكيفي، يتغلب المؤلفون على العديد من مشكلات الحجم والثبات التي أعاقت الأجهزة المماثلة سابقًا. بينما ستحتاج الإصدارات المستقبلية إلى رؤية محمولة أفضل واتخاذ قرارات أذكى لتعمل بشكل مستقل تمامًا، تُشير هذه الدراسة إلى مستقبل قد تساعد فيه «الأيدي الطائرة» في توصيل الطرود ومساعدة ذوي الإعاقة وصيانة البُنى التحتية وأداء مهام دقيقة في أماكن صعبة أو خطرة على البشر.
الاستشهاد: Wu, Y., Yang, F., Jin, R. et al. Hand-like autonomous flying robot for airborne grasping and interaction. Nat Commun 17, 2200 (2026). https://doi.org/10.1038/s41467-026-68967-3
الكلمات المفتاحية: التلاعب الجوي, يد روبوتية طائرة, الطائرات بدون طيار, التفاعل بين الإنسان والروبوت, الروبوتات المقلدة للطبيعة