Clear Sky Science · ar
قفز روبوتي مُعزَّز بانخفاض الجاذبية الناجم عن الدفع، يحقِّق قفزات دقيقة، قابلة للتنبؤ ومطوَّلة
روبوتات تقفز كما لو أنها على القمر
تخيل روبوت إنقاذ يمكنه القفز فوق الجدران، العبور عبر الجداول، أو الانقضاض عبر نافذة متحركة دون أن يفوت موقع الهبوط بأكثر من سنتيمتر واحد. تصف هذه الورقة نوعًا جديدًا من الآلات القافزة التي تفعل ذلك بالضبط من خلال منح نفسها «جاذبية منخفضة» لفترة قصيرة، شبيهة بالإحساس على سطح القمر أو بلوتو، مع الحفاظ على قفزاتها دقيقة وقابلة للتنبؤ.
لماذا تعاني الروبوتات القافزة اليوم
تمتلك حيوانات مثل جراد الشجري أو الضفادع قدرة على القفز لمسافات طويلة، والهبوط على قواعد ضيقة، والتعديل في الهواء عندما يتغير شيء ما. معظم الروبوتات لا تستطيع ذلك. تواجه الروبوتات القافزة التقليدية مقايضة: إما أن تقفز بعيدًا جدًا باستخدام زنبركات أو محركات قوية، أو أن تهبط بدقة وأمان، ونادرًا ما تجمع بينهما. تصاميم «المقلاع» المخزنة بالطاقة توفر طاقة كبيرة لكنها بطيئة في إعادة الشحن وصعبة التحكم فيها بعد انطلاقها في الهواء. الأرجل المدفوعة مباشرة بالمحركات أسهل في التحكم لكنها تفتقر إلى دفعة القوة اللازمة للقفزات العالية جدًا. الإضافات مثل الأجنحة أو الدوارات قد تطيل وقت التحليق، لكنها غالبًا ما تجعل مسار الطيران فوضويًا وغير متوقع، وهو مشكلة إذا كان عليك الوصول إلى هدف صغير أو تفادي عقبات متحركة.
تمويه الجاذبية المنخفضة بدفع هوائي
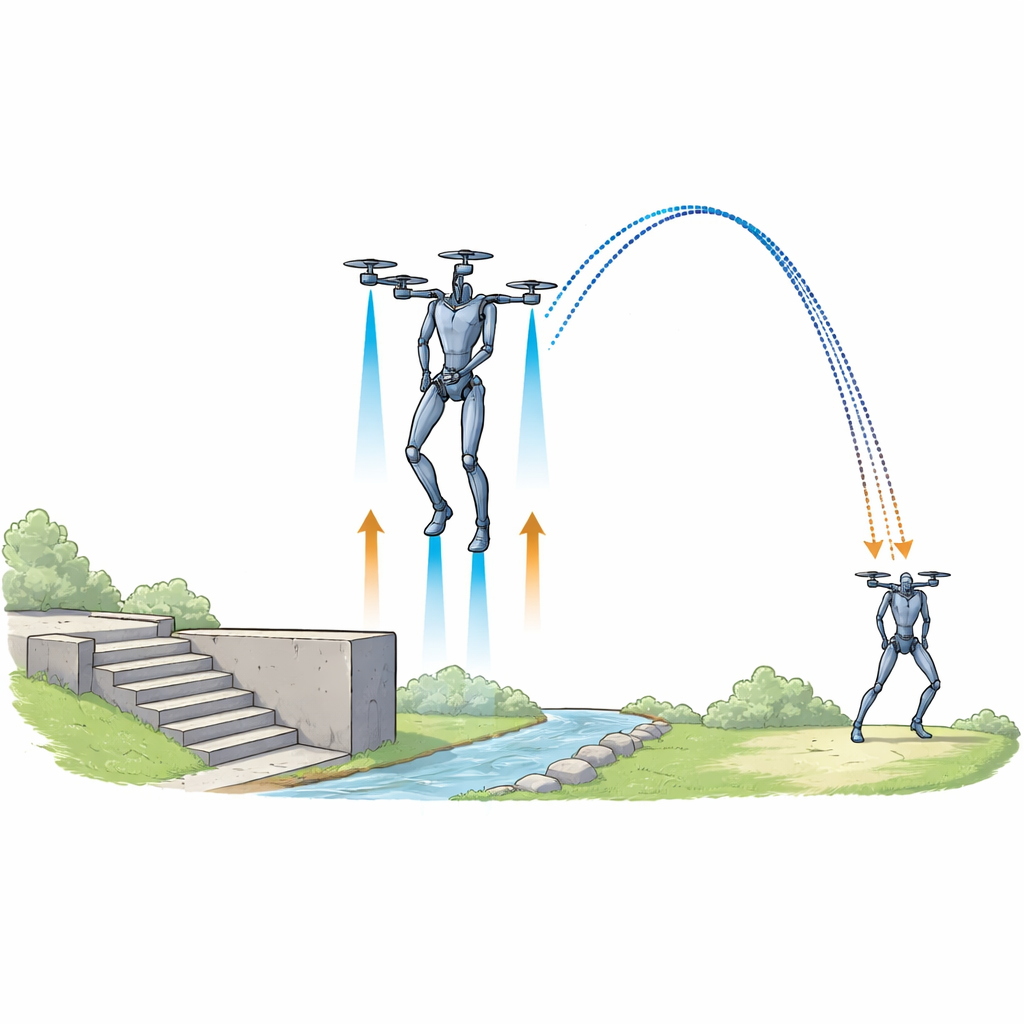
أنشأ الباحثون روبوتًا ثنائي الساق يزن 370 غرامًا يُدعى GravOff يتجنب هذه المقايضة عن طريق خلق بيئة منخفضة الجاذبية خاصة به. يمتلك الروبوت زوجًا من الأرجل الطويلة ذات مظهر حشري تُحرك مباشرة بالمحركات، بالإضافة إلى أربعة مراوح صغيرة مركبة على إطار عريض. أثناء القفز، تمنح الأرجل دفعة سريعة عن الأرض للوصول إلى سرعة انطلاق عالية. وفي الوقت نفسه، تدفع المراوح للأعلى بما يكفي فقط لإلغاء جزء من جاذبية الأرض، حالة يسميها المؤلفون انخفاض الجاذبية الناتج عن الدفع. لأن «الجاذبية الفعالة» أقل، فإن نفس طاقة الأرجل تُرسل الروبوت على قوس أعلى وأطول بكثير—حتى ارتفاع 6.9 متر، نحو 46 ضعف طول جسده—مقارنةً بأفضل القافزين القياسيين ولكن بسرعة إقلاع وهبوط أكثر ليونة.
رسم وتوجيه القوس المثالي
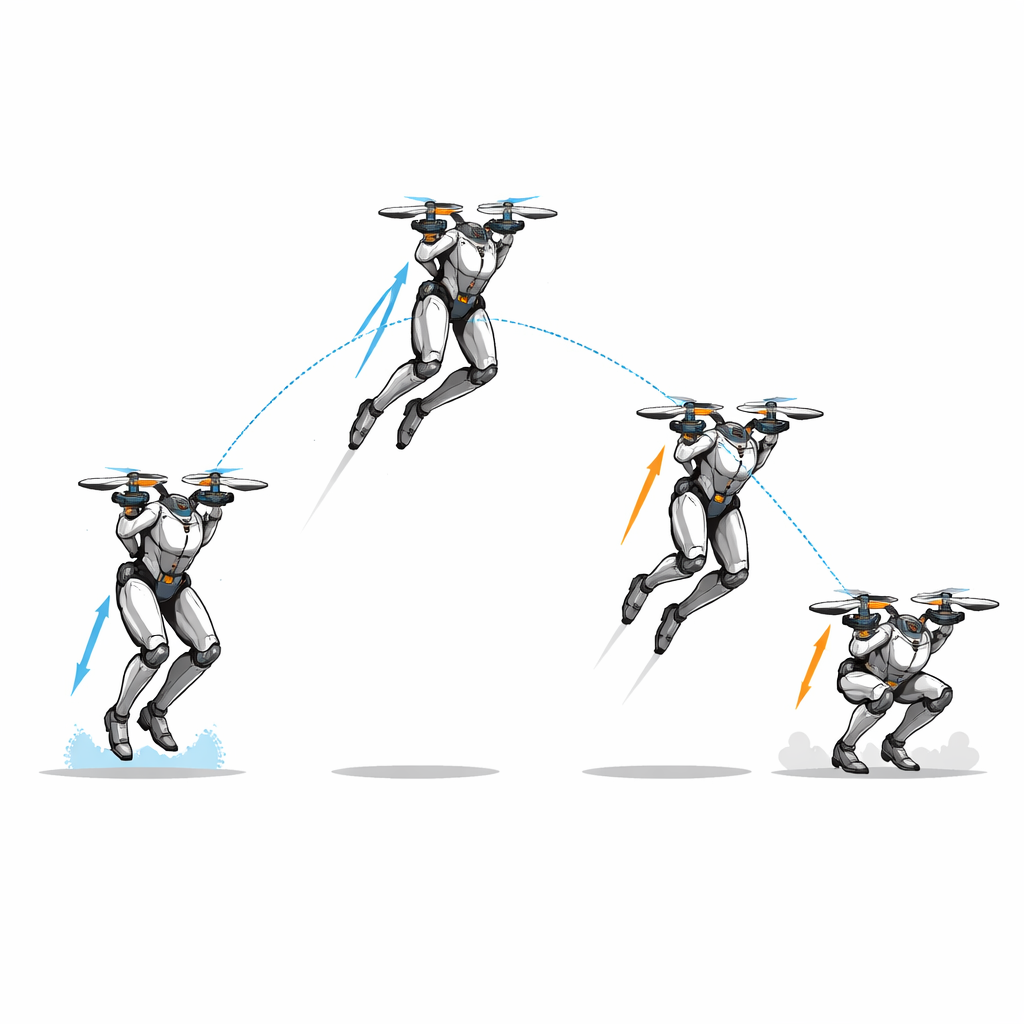
ما يجعل GravOff غير عادي ليس فقط المسافة التي يقفزها، بل دقته في اتباع مسار مختار. يعامل الفريق كل قفزة على أنها قوس مؤرَّخ زمنيًا، حيث تُقفل الموضع والزمن معًا مثل نقاط على قطع مكافئ مرسوم. باستخدام المستشعرات وخوارزمية تحكم تنبؤية، يقارن الروبوت حركته الفعلية في الهواء مع منحنى المرجع هذا عشرات المرات في الثانية ويميل مراوحه قليلًا لينقله مرة أخرى إلى المسار. والأهم أن المراوح يمكن أن تدور بشكل مستقل عن انحناء جسم الروبوت، لذا يمكن للروبوت توجيه دفعه دون أن يميل إطاره كله، محافظًا على التوازن وفصل التوجيه. يتيح هذا التحكم المزدوج لـ GravOff الهبوط داخل مربع بطول 25 سنتيمترًا على كل جانب مع تكرارية على مستوى المليمتر، حتى إن كان زاوية الإقلاع خاطئة بما يصل إلى 15 درجة أو عندما تضربه مروحة قوية برياح سرعتها 3.5 متر/ث أثناء الطيران.
هبوطات ناعمة ومستقرة بلا ارتداد
عادةً ما تعني القفزات العالية هبوطات قاسية، والتي يمكن أن تتلف الأجهزة أو تقذف الروبوت متدحرجًا. يتعامل GravOff مع هذا عبر وضعين للهبوط. للتصادمات الشديدة، يساعد ممتص صدمات مطبوع ثلاثي الأبعاد في كل ساق على امتصاص الطاقة. وللهبوطات الدقيقة على أهداف صغيرة أو متحركة، يسحب الروبوت ساقيه بنشاط ثم يعيد مدها في اللحظة المناسبة تمامًا، مطيلًا وقت الاحتكاك بالأرض. يقلص هذا «التخميد النشط» قوى الصدمة بمقدار أربعة أضعاف مقارنة بالهبوط السلبي ويقارب إلغاء الزخم الداخل، بحيث يتوقف الروبوت عند أول ملامسة بدلاً من الارتداد بعيدًا.
من قفزات المختبر إلى مهام العالم الحقيقي
بعيدًا عن الاختبارات الداخلية المحكمة، يبين المؤلفون أن GravOff يمكنه الجمع بين القفز والزحف والدفع بالعجلات للتعامل مع التضاريس الحقيقية. يمكنه الزحف ببطء عبر العشب، الرمل، الحصى والأرصفة المخددة ليتخذ وضعية إقلاع آمنة، ثم يستخدم قفزات الجاذبية المنخفضة لعبور عقبات مثل سلالم متعددة المستويات، جدار ارتفاعه 2.35 متر، أو جدول عرضه ثلاثة أمتار. كما يثبت استراتيجية القفز بالجاذبية المنخفضة أنها أكثر كفاءة في استهلاك الطاقة بكثير من الطيران الخالص عند تجاوز عقبات متوسطة الحجم: في بعض التجارب، استخدمت القفزات أقل من عُشر الطاقة الإجمالية المطلوبة للتحويم أو الطيران فوق نفس الحاجز.
ماذا يعني هذا للروبوتات المستقبلية
بشكل مبسط، تُظهر هذه الدراسة أن الروبوتات يمكنها القفز لمسافات أبعد، بدقة أكبر، وبأمان أفضل عن طريق التظاهر بأن الجاذبية أضعف وبواسطة تعديل مسارها بعد الإقلاع. يشير تصميم GravOff إلى مستكشفين مستقبليين قد يقفزون عبر الركام أثناء الاستجابة للكوارث أو يعبرون المنحدرات والحفر على كواكب أخرى، مع توقع دقيق لمكان وزمان هبوطهم. يمكن إضافة نفس الأفكار—معادلة الجاذبية بالدفع وتوجيه القوس أثناء الطيران—إلى العديد من الروبوتات القافزة الأخرى، مما قد يحوّل القفز إلى وضع تنقّل موثوق مخطط مسبقًا بدلًا من ملاذ أخير محفوف بالمخاطر.
الاستشهاد: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
الكلمات المفتاحية: الروبوتات القافزة, انخفاض الجاذبية, توجيه الدفع, التنقل ذو الأرجل, تحكم المسار