Clear Sky Science · ar
بُنية نابضة مستوحاة من الطبيعة تمكّن ترميز اللمس ضمن قيود الطاقة
لماذا اللمس الأذكى مهم للروبوتات
تسمح لنا أطراف أصابعنا بإحساس حبة رمل أو كوب ينزلق أو لمسة خفيفة في جزء من الثانية، وكل ذلك باستخدام طاقة ضئيلة بشكل ملحوظ. مع انتقال الروبوتات من المصانع إلى المنازل والمستشفيات وأماكن العمل المزدحمة، ستحتاج إلى إحساس باللمس مشابه للتفاعل بأمان مع الناس والأشياء الهشة. تقدم هذه الدراسة جلدًا صناعيًا جديدًا ونظام معالجة مستوحى من الدماغ يتيح للآلات اكتشاف مواضع اللمس بدقة عالية، مع إبقاء استهلاك الطاقة منخفضًا للغاية — وهو مطلب أساسي للروبوتات المحمولة والمتعاونة في المستقبل.
جلد مرن يحاكي جلدنا
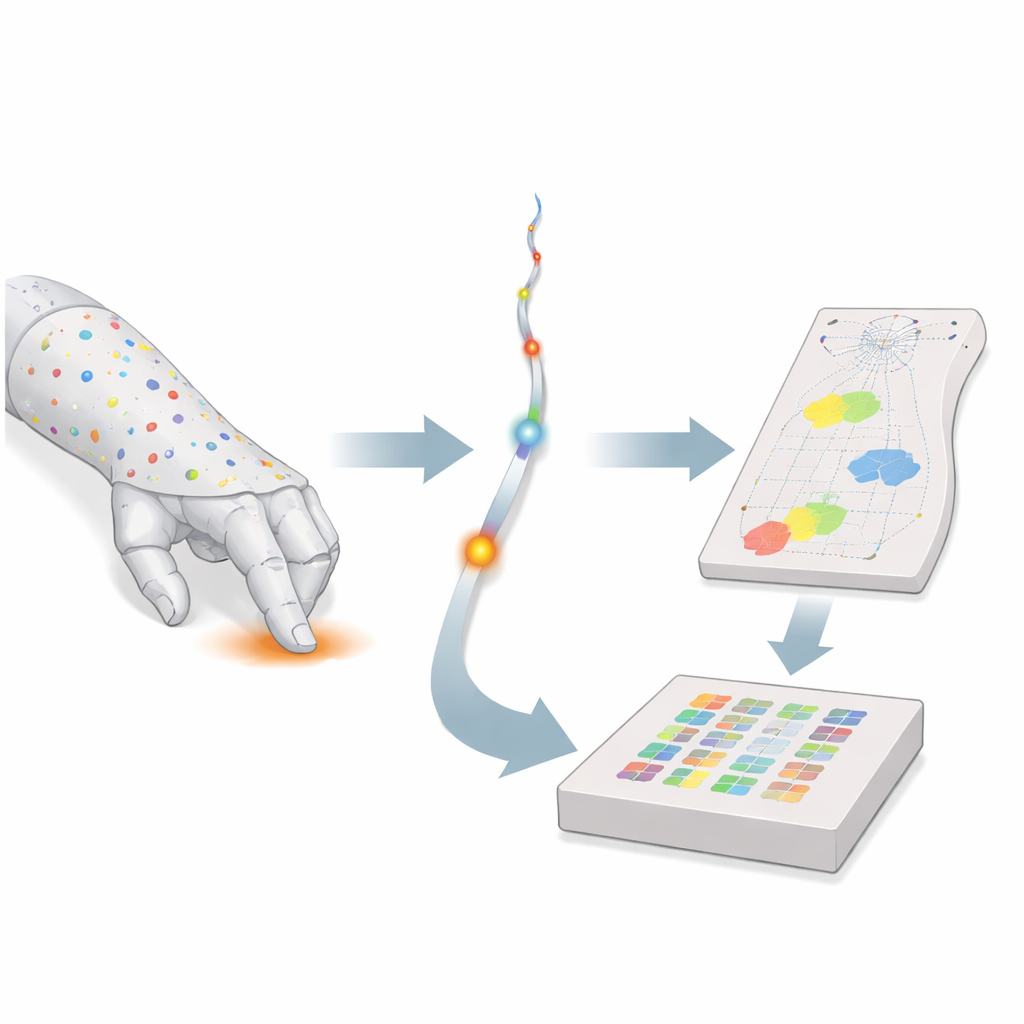
بنى الباحثون "جلدًا إلكترونيًا" لينا من السيليكون على شكل ساعد بشري وزُرعت فيه 21 مجسًا بصريًا صغيرًا على طول ليف واحد رفيع كالشعر. تستجيب هذه المجسات، المسماة مقاييس براج الليفية (Fiber Bragg Gratings)، للتمدد والانحناء في الجلد بتغيير لون الضوء المنعكس داخل الليف. وبما أن الليف يمر تحت السطح، فإن كل مجس حساس ليس لنقطة واحدة فحسب بل لمنطقة صغيرة، تمامًا كما مستقبلات اللمس الحقيقية المنتشرة في جلدنا. بعض هذه المستقبلات الاصطناعية تتفاعل بشدة مع الضغط المحلي جدًا، بينما تستجيب أخرى بشكل أوسع للتشوهات، مما يعكس كيف تلتقط نهايات الأعصاب المختلفة في جلد الإنسان كلًا من التفاصيل الدقيقة والشكل العام.
تحويل اللمس إلى نبضات كهربائية
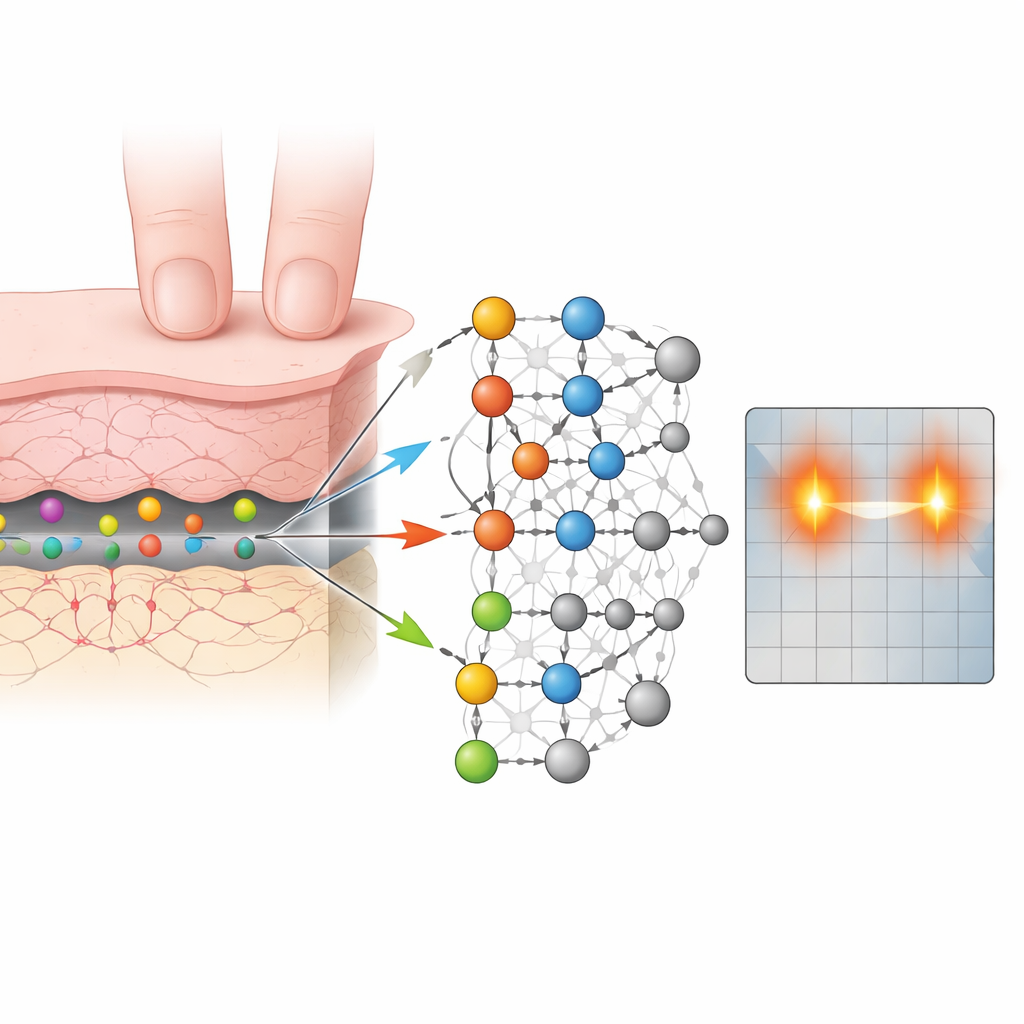
لفهم هذا التدفق الغني من البيانات، لم يعتمد الفريق على نماذج التعلم العميق التقليدية التي تعالج إطارات من الأرقام. بدلًا من ذلك، حاكت المجموعة البيولوجيا بشكل أدق باستخدام شبكة عصبية نابضة، حيث تنتقل المعلومات عبر نبضات كهربائية قصيرة أو "شوكات" تشبه النبضات العصبية. تُحوَّل الإشارات الضوئية من الجلد الإلكتروني إلى تدفقات من الشوكات وتُرسَل إلى الشبكة. يمثل كل عصبون مخرج في هذه الشبكة موضعًا محددًا على الجلد، مكونًا خريطة داخلية ثنائية الأبعاد للسطح. عندما يلمس شيء ما الجلد الإلكتروني، ينفرط عنقود من العصبونات بنمط يكشف موقع التلامس، وتحسب النظام موقع اللمس من مركز هذه النشاطات.
لمس أكثر حدة بموارد أقل
باستخدام هذا التصميم، يحدد النظام نقاط اللمس المفردة على الساعد الصناعي بخطأ نموذجي يقارب ثلاثة مليمترات، متفوقًا بحوالي ثلث على خط أساس قوي للتعلم العميق ويحقق دقة مكانية أفضل بنحو عشر مرات مما قد يُتوقع من تباعد المجسات وحده. يعمل أيضًا عندما تُضغط عدة نقاط في آن واحد، حتى أربعة اتصالات متزامنة، وعند تطبيق الضغط يدويًا بقوى واتجاهات مختلفة. استكشف الباحثون أنماط توصيل داخلية مختلفة في الشبكة ووجدوا أن تخطيطًا مستوحى من مسارات اللمس المبكرة في الحبل الشوكي — حيث تغذي الخلايا المثيرة خلايا ثانوية مثبطة تكبح المخرجات المجاورة — أمر حاسم لشحذ التفاصيل المكانية. تساعد هذه "المنع الجانبي" على إبقاء التمثيل حادًا، مما يمنع الضبابية عندما تكون نقاط التلامس قريبة من بعضها.
مصمم للطاقة المنخفضة، وليس للدقة فحسب
هدف أساسي في العمل هو ضبط استهلاك الطاقة، وهي مسألة تصبح حاسمة إذا غُطّي جسم روبوت كامل بمستشعرات. درّب الفريق الشبكة تحت ضغط متزايد لإطلاق شوكات أقل، محاكيًا حاجة التطور للموازنة بين الأداء الخام وتكلفة الاستقلاب. في ظروف غير مقيدة، قدّمت بنية أكثر مرونة وأقل محاكاة بيولوجية أداءً أفضل قليلًا. لكن بمجرد تقليل نشاط الشوكات إلى مستويات فعّالة في الطاقة، تفوقت البنية المستوحاة من الطبيعة فعليًا، مقدمًة دقة أعلى لنفس ميزانية النشاط. ثم نقل الباحثون هذه الشبكة إلى شريحة نومورفينية ذات إشارة مختلطة تنفذ العصبونات والمشابك مباشرة في إلكترونيات تماثلية. على هذا العتاد، عمل نظام اللمس بطاقة دون ميلي واط أثناء اللمس وقليلًا من مايكرواط في حالة السكون، مع خسارة طفيفة في الدقة.
من ساعد المختبر إلى أجساد الروبوتات المستقبلية
بشكل عام، تُظهر هذه الدراسة أن الجمع الدقيق بين الاستشعار الناعم الموزع والحوسبة النابضة الشبيهة بالدماغ يمكن أن يمنح الآلات إحساسًا دقيقًا وسريعًا باللمس دون فاتورة طاقة مرتفعة. من خلال مطابقة ليس الأداء فحسب بل أيضًا مبادئ التوصيل لمسارات اللمس المبكرة في الجهاز العصبي، يشير النظام إلى سبب احتمالية تفضيل التطور لِبعض أشكال الدوائر: فهي توفر دقة كافية تحت قيود طاقة صارمة. عند التوسع، قد تسمح أَجِلّدة إلكترونية مماثلة ومعالجات نومورفينية للروبوتات والأطراف الاصطناعية بالإحساس بالتلامس عبر أسطحها، والتفاعل بسرعة مع الصدمات غير المتوقعة، والتعامل بأمان وبطريقة أكثر طبيعية في البيئات المعقدة والدينامية التي يعيش ويعمل فيها البشر.
الاستشهاد: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
الكلمات المفتاحية: جلد صناعي, الاستشعار اللمسي, شبكات عصبية نابضة, عتاد نومورفيني, سلامة الروبوتات