Clear Sky Science · ar
تدريب أجهزة الاستشعار اللمسية على تعلّم استشعار القوة من بعضها البعض
روبوتات تستطيع الإحساس ومشاركة إحساسها باللمس
مع انتقال الروبوتات من المصانع إلى المنازل والمستشفيات والمستودعات، تحتاج إلى حاسة نأخذها عادة كأمر مفروغ منه: اللمس. تمامًا كما تضبط أصابعنا تلقائيًا قوتها عند التقاط رقائق البطاطس مقابل صندوق ثقيل، يجب أن تتعلّم الروبوتات المستقبلية مدى الضغط اللازم ومتى يكاد الشيء ينزلق. يقدم هذا المقال طريقة جديدة لـ "جلد" الروبوتات ليتعلّم استشعار القوة من جلود أخرى، مما يقلّل من معايرات مكلفة ويقرب الآلات من البراعة الشبيهة بالإنسان.
لماذا من الصعب الحصول على لمسة روبوتية صحيحة
تملك الروبوتات الحديثة بالفعل أنواعًا عديدة من الجلد الصناعي. بعضها يستخدم كاميرات صغيرة تنظر إلى داخل مواد هلامية لينة، والبعض الآخر يعتمد على مغناطيسات أو مصفوفات إلكترونية تكتشف الضغط. يتفوق كل تصميم في مهام معينة، لكن جميعها تتحدث "لهجات" مختلفة من اللمس: يمكن أن تولّد نفس الضغطة على جهازين إشارات مختلفة تمامًا. اليوم، عادة ما يحتاج كل حساس جديد إلى عملية تدريب مرهقة باستخدام مقاييس قوة دقيقة، تتكرر آلاف المرات. والأسوأ أن المواد اللينة تتآكل وتشيخ، لذا يجب إعادة هذه المعايرة المكلفة كلما استُبدل الحساس.
استعارة فكرة من الدماغ البشري
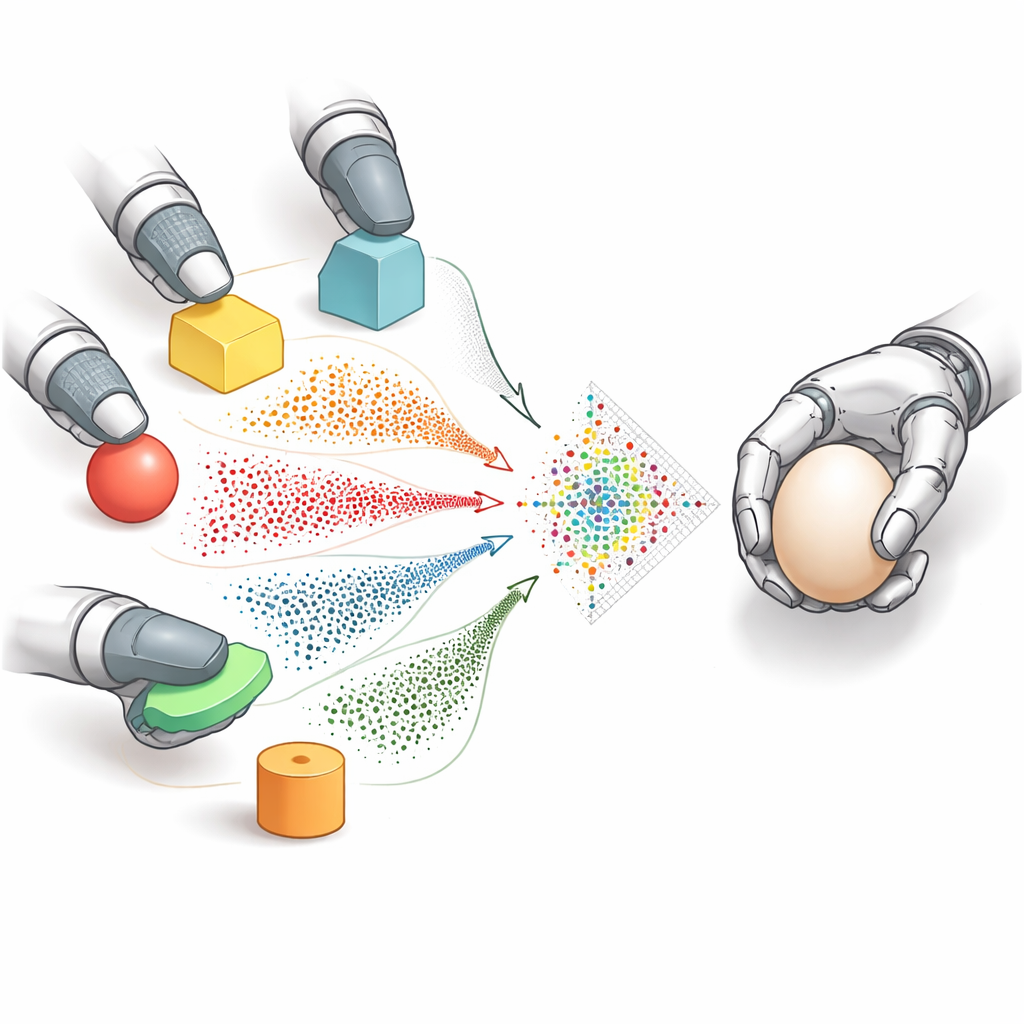
يحل البشر مشكلة مشابهة بسهولة. بشرتنا مليئة بأنواع مختلفة من مستقبلات اللمس، ومع ذلك يحول الدماغ جميع إشاراتها إلى رمز داخلي مشترك. تُمكّننا تلك الذاكرة اللمسية الموحدة من تقدير كيف سيشعر شيء ما في جزء من اليد لم يلمسه من قبل، ببساطة بالاستناد إلى الخبرة السابقة. يحاكي الباحثون وراء هذا العمل الفكرة في الروبوتات. يحولون كل مخرجات الحساس—صور الكاميرا أو قراءات مغناطيسية أو إشارات إلكترونية—إلى شكل مشترك شبيه بصورة مكوّن من نقاط، تمثل كيف ينحني الجلد. تعمل هذه التمثيلات المشتركة من العلامات كلغة بسيطة "لللمس" يمكن لأي حساس استخدامها.
تعليم حساس واحد تقليد الآخر
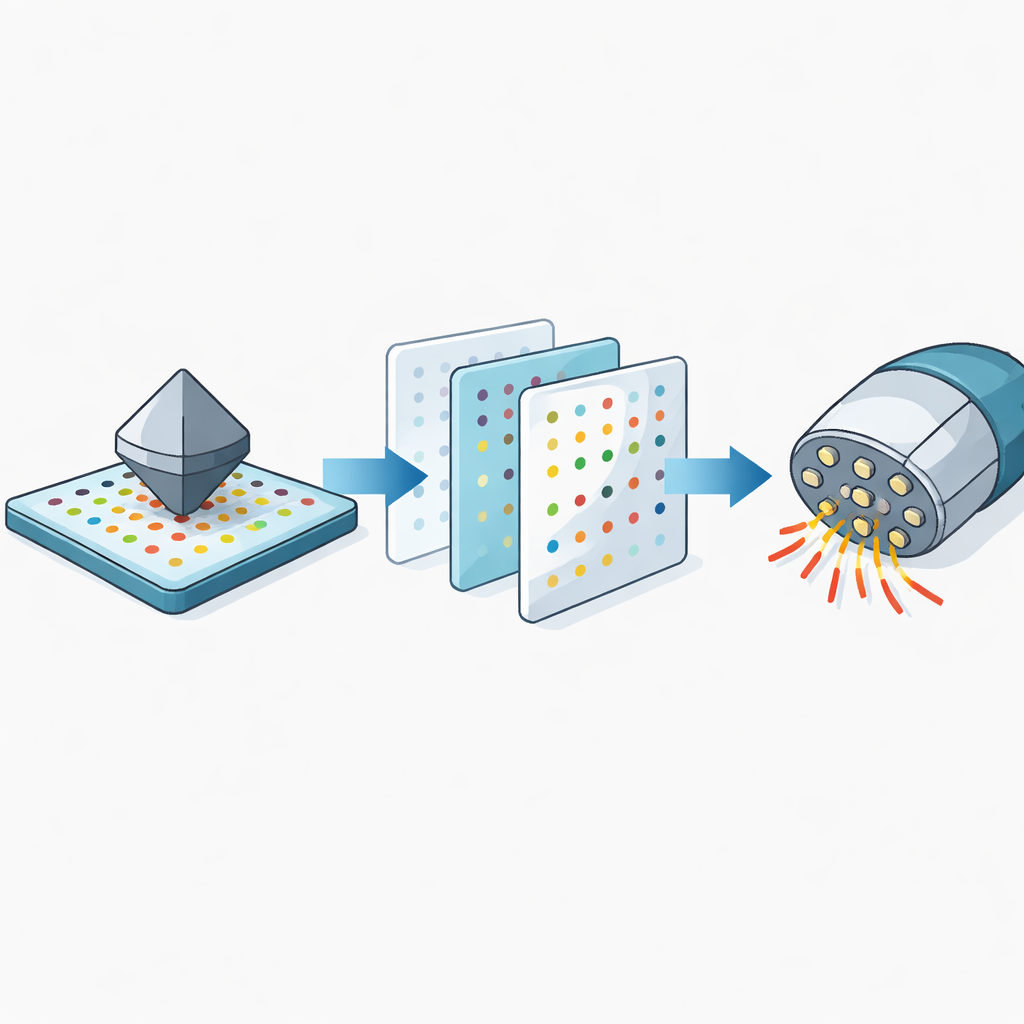
بمجرد أن تتحدث كل الحساسات هذه اللغة القائمة على النقاط، يُدخل الفريق خطوة ترجمة تُسمى ترجمة علامة إلى علامة. باستخدام نماذج توليدية قوية، يدربون نظامًا يستطيع تحويل نمط النقاط من حساس إلى النمط الذي كان حساسًا مختلفًا سيظهره تحت نفس التماس. هذا يعني أن حساسًا مُعايَرًا جيدًا يمكنه فعليًا "تخيّل" ما سيشعر به حساس غير معاير، وتوليد بيانات تدريب صناعية له. ثم ينظر نموذج ثانٍ إلى سلاسل قصيرة من هذه الصور النقطية للتنبؤ بكيفية تغير القوى مع الزمن في ثلاثة اتجاهات، مأخذًا في الاعتبار الدفعة والقص الجانبي.
التعامل مع اختلافات العالم الحقيقي في الجلد اللين
في الممارسة العملية، ليست جلود الروبوت المختلفة متشابهة في الشكل والتوصيل فحسب؛ بل تصنع أيضًا من مواد قد تكون أكثر ليونة أو صلابة، وتتغير مع مرور الزمن. يمكن أن تشوّه هذه الاختلافات تقديرات القوة حتى لو كانت الأنماط تبدو متشابهة. يقيس الباحثون كيف ينثني كل نوع من المواد اللينة تحت التحميل ويبنون خطوة تصحيح بسيطة تُعدّل تسميات القوة صعودًا أو هبوطًا قبل التدريب. يقلّل تعويض المادة هذا كثيرًا من الأخطاء، خاصة عند نقل المعرفة بين جلود لينة جدًا وصلبة جدًا.
من مقعد المختبر إلى التعامل اليومي
يختبر الفريق طريقتهم، المسماة GenForce، على مجموعة واسعة من الحساسات، من نسخ متعددة لنفس اللوحة القائمة على الكاميرا إلى تصاميم مختلفة جدًا تستخدم مغناطيسات أو أشكال منحنية تشبه أطراف الأصابع. عبر أكثر من 200 توليفة في المحاكاة والأجهزة الحقيقية، يخفض GenForce أخطاء التنبؤ بشكل حاد مقارنة بإعادة استخدام نموذج مُدرّب على حساس آخر. في العروض التوضيحية، تستخدم يد روبوت مُزوّدة بجلود لمسية مختلفة على كل إصبع نماذج منقولة لتقبّض برفق على أغراض هشة مثل الفاكهة ورقائق البطاطس، وللكشف عن انزلاق الأشياء وتصحيحها عبر تنسيق قراءات كلا جانبي القبضة.
ماذا يعني هذا لمستقبل أيادي الروبوت
من خلال السماح لأجهزة الاستشعار اللمسية بتعلّم استشعار القوة من بعضها بدلًا من البدء من الصفر، يُشير GenForce إلى أيادي روبوت أسهل وأرخص في النشر على نطاق واسع. قد يقوم حساس واحد معاير بعناية بتدريب العديد من الحساسات الأخرى، حتى إن كانت من تصاميم مختلفة، ويمكن أن تُضبط النماذج المسبقة التدريب بكمية صغيرة فقط من البيانات الجديدة. للمستخدمين غير المتخصصين، الخلاصة بسيطة: يسهّل هذا العمل على الروبوتات أن تشعر بمدى قوة قبضتها وأن تستجيب سريعًا عندما تبدأ الأشياء بالانزلاق، مما يقربنا من آلات تتعامل مع العالم الحقيقي بلمسة واثقة تشبه يد الإنسان.
الاستشهاد: Chen, Z., Ou, N., Zhang, X. et al. Training tactile sensors to learn force sensing from each other. Nat Commun 17, 2101 (2026). https://doi.org/10.1038/s41467-026-68753-1
الكلمات المفتاحية: لمس الروبوت, أجهزة الاستشعار اللمسية, استشعار القوة, تحكم الروبوت, نقل التعلّم