Clear Sky Science · ar
الإدراك البصري فائق السرعة يتجاوز قدرات الإنسان بفضل تحليل الحركة باستخدام ترانزستورات تشابكية
لماذا تعتبر الرؤية الأسرع للروبوت مهمة
عندما يتأخر نظام القيادة الذاتية في سيارة أو طائرة بدون طيار حتى بجزء من الثانية عن الاستجابة، قد تكون العواقب وخيمة. خوارزميات رؤية الحاسوب الأفضل اليوم قد تضاهي أو تتفوق على البشر في الاختبارات القياسية، لكنها لا تزال تستغرق وقتًا طويلاً لمعالجة كل إطار فيديو في الزمن الحقيقي. تعر ض هذه الورقة نوعًا جديدًا من أجهزة الرؤية مستوحى من الدماغ يسمح للآلات باكتشاف الحركة أسرع بكثير من البشر، دون التضحية بالدقة.
كيف نعلّم الآلات عادةً رؤية الحركة
يعتمد التحليل الحركي التقليدي على تقنية تُسمى التدفق البصري، التي تقدّر كيفية تحرك كل نقطة في الصورة من إطار إلى آخر. تعمل هذه التقنية جيدًا لكنها مكثفة حسابيًا: لصورة ذات دقة عالية كاملة، قد يحتاج معالج رسومي قوي إلى أكثر من نصف ثانية لإتمام المهمة. في سيناريوهات الحركة السريعة مثل القيادة على الطرق السريعة، يمكن أن يترجم هذا التأخير إلى عشرات الأمتار المقطوعة قبل أن يتعرف النظام على الخطر. على عكس النظام البصري البشري الذي يركز بسرعة على الأجزاء الأكثر صلة من المشهد، تعالج الخوارزميات القياسية كل بكسل بعناية، حتى في مناطق الخلفية الثابتة التي لا تحمل معلومات مفيدة كبيرة.
استعارة حيلة من مراحل الرؤية المبكرة في الدماغ
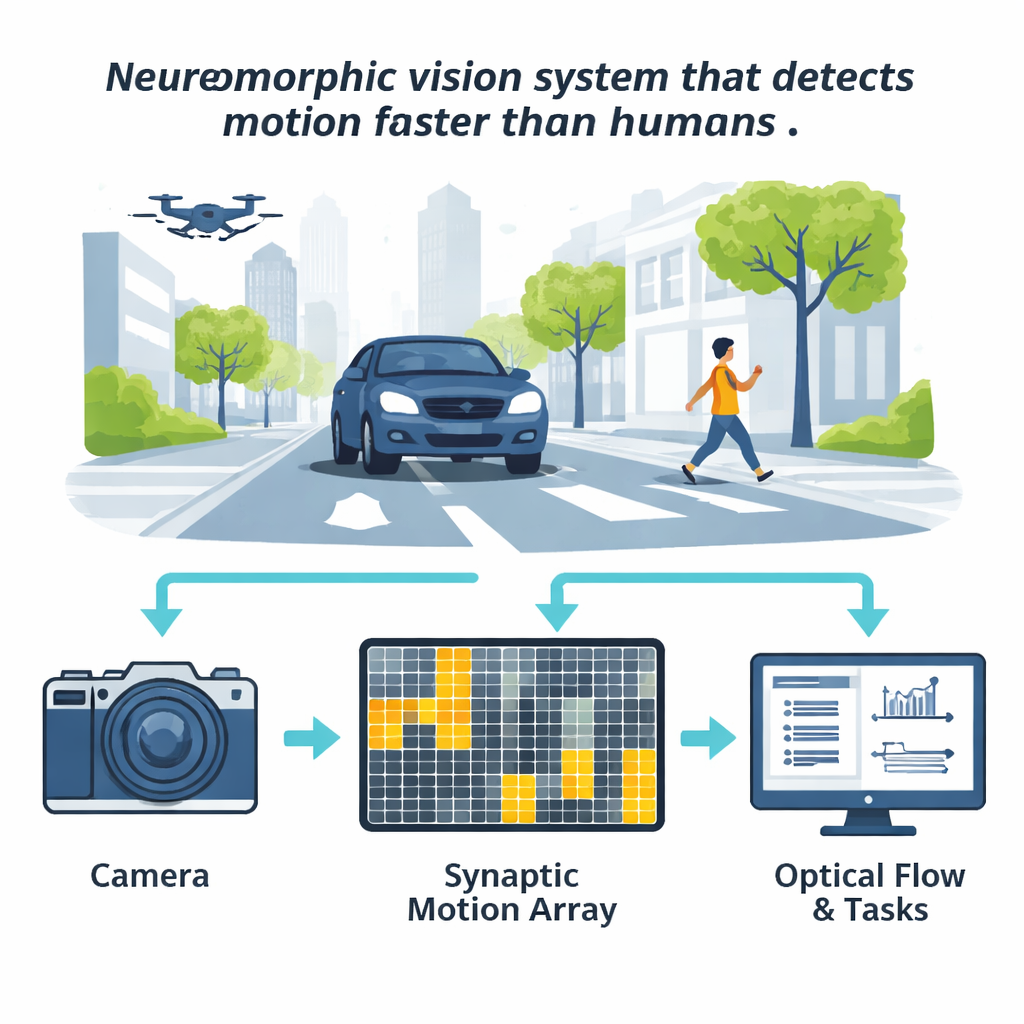
تحل البيولوجيا هذه المشكلة باستخدام طبقات ترشيح مبكرة في العين والمهاد لتسليط الضوء على أماكن حدوث التغير وتقليل أهمية كل شيء آخر. يقلد المؤلفون هذه الفكرة في السيليكون ببناء وحدة "انتباه زمني" عصبية محاكية للدماغ. تلتقط الكاميرا القياسية الصور كما هي، لكن تغيّرات السطوع تُغذى أيضًا إلى شبكة مدمجة من الترانزستورات التشابكية — أجهزة إلكترونية تتصرف بشكل يشبه الوصلات القابلة للتعديل في الدماغ. كل جهاز يجمع محليًا مقدار التغير في الضوء في منطقته المخصصة خلال نافذة زمنية قصيرة. تضيء بقع من الشبكة تشهد تغيرًا قويًا كمناطق ذات اهتمام، بينما تتلاشى المناطق الهادئة إلى الخلفية.
ترانزستورات ذكية تتذكّر الحركة
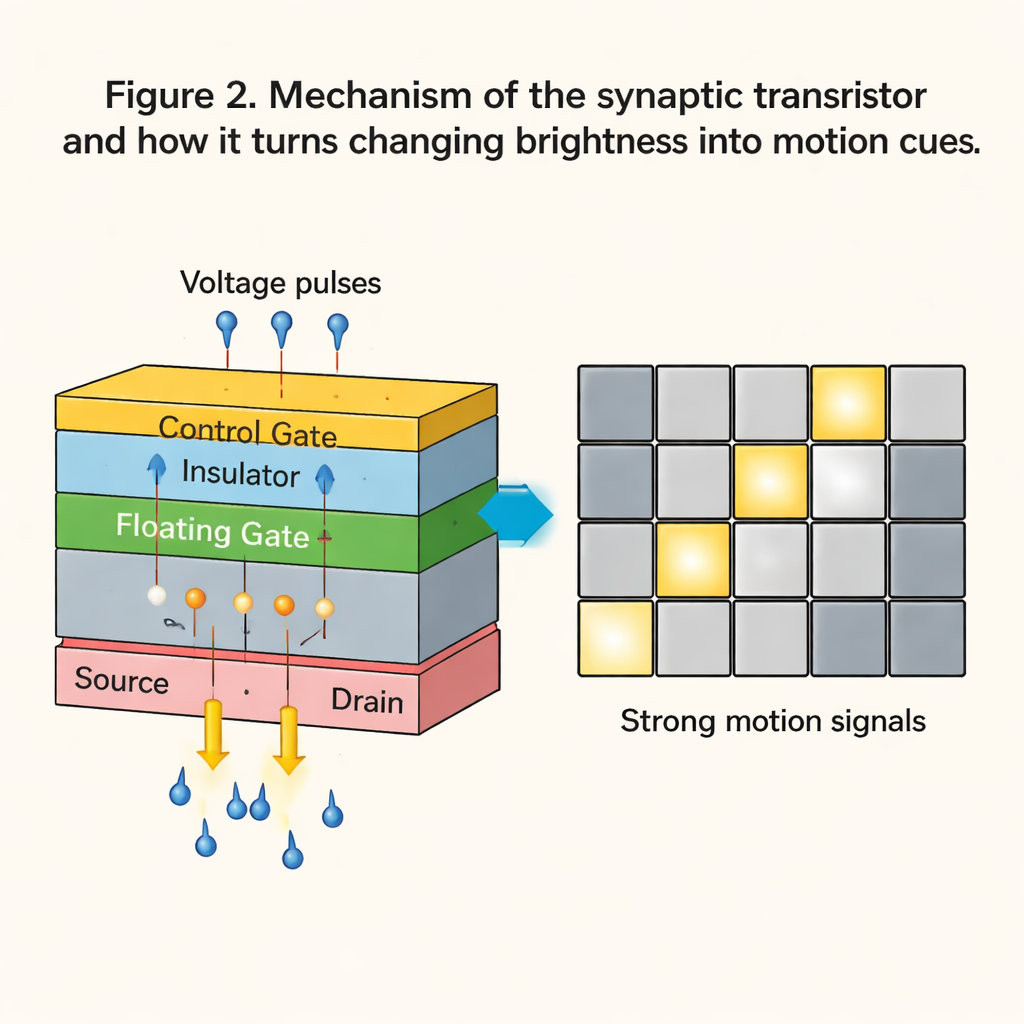
في قلب هذا النظام يوجد ترانزستور تشابكي ذو بوابة عائمة مُصمم خصيصًا من مواد رقيقة بطبقات ذرية. عن طريق تطبيق نبضات جهد قصيرة، يمكن ضبط موصلية الجهاز ثم الاحتفاظ بها لساعات، مما يخزن بشكل فعّال ذاكرة للنشاط البصري الحديث. تستجيب الترانزستورات في حوالي 100 ميكروثانية — وهو أسرع بما يكفي لفيديو عالي السرعة — وتتحمل آلاف دورات التحديث دون تدهور. قام الفريق بتوسيع جهاز واحد إلى مصفوفة 4×4 وأظهر كيف تحوّل تغيّرات سطوع الكاميرا إلى نبضات جهد تدفع بعض الخلايا انتقائيًا إلى حالات "حركة" ذات موصلية عالية بينما تقمع الوميض الطفيف والضوضاء.
تركيز الحسابات الثقيلة فقط حيث يهم الأمر
يُحول خرج المصفوفة إلى "خريطة حرارة"粗ة للحركة تشير إلى مناطق اهتمام مدمجة. بدلًا من تشغيل كود التدفق البصري المكلف على الصورة بأكملها، يحلل النظام هذه المناطق المظللة فقط، مع بعض الحشو حولها. يبرهن المؤلفون أن هذا النهج يندمج مباشرة مع عدة طرق شائعة للتدفق البصري، من خوارزميات كلاسيكية مثل فارنبك إلى نماذج التعلم العميق الحديثة مثل RAFT وGMFlow. عبر اختبارات شملت سيارات وطائرات بدون طيار وأذرع روبوتية ورياضات سريعة مثل تنس الطاولة، يقلل الواجهة العصبية المحاكية للدماغ زمنيًا من الوقت المستغرق في تقدير الحركة والمهام اللاحقة — مثل التنبؤ بمكان تحرك جسم ما، أو فصل الأجسام المتحركة عن الخلفية، أو تتبع هدف — بحوالي عامل أربعة.
التفوّق على رد فعل الإنسان دون فقدان الدقة
والأهم أن هذا التسريع لا يأتي على حساب الموثوقية. من خلال توفير معلومات إضافية عن أماكن احتمال وجود حركة، تحسّن الإشارات الزمنية في كثير من الأحيان الدقة، خاصة في تتبع الأجسام والتقسيم في المشاهد المزدحمة. في سيناريوهات المركبات والطائرات الصغيرة، تضاعفت مقاييس أداء المهام أكثر من الضعف مقارنة بخطوط الأنابيب التقليدية، بينما انخفضت أوقات المعالجة الإجمالية إلى عشرات المللي ثانية — ما يعادل أو يتفوق على أوقات رد فعل الإنسان النموذجية البالغة نحو 150 مللي ثانية. يجادل المؤلفون بأن واجهة الحركة العصبية هذه يمكن إقرانها بالعديد من خوارزميات الرؤية الحالية، وحتى مع كاشفات الأجسام بجانب التدفق البصري، لمنح الروبوتات والمركبات والآلات التفاعلية وسيلة أسرع وأكثر تركيزًا لفهم البيئات الديناميكية.
الاستشهاد: Wang, S., Zhao, J., Pu, T. et al. Ultrafast visual perception beyond human capabilities enabled by motion analysis using synaptic transistors. Nat Commun 17, 1215 (2026). https://doi.org/10.1038/s41467-026-68659-y
الكلمات المفتاحية: الرؤية العصبية المماثلة للدماغ, تدفق بصري, ترانزستورات تشابكية, إدراك الروبوت, القيادة الذاتية