Clear Sky Science · ar
أقطاب هلامية للحصول على إشارات sEMG عالية الدقة والتحكم في يد روبوتية
الاستماع إلى العضلات لتحريك الآلات
تخيّل أن تتحكم في يد روبوتية بمجرد شدّ عضلاتك. بالنسبة للأشخاص الذين فقدوا وظيفة اليد، أو للعمال الذين يحتاجون إلى مساعدة روبوتية دقيقة، يمكن أن يكون هذا الرابط السلس بين الجسد والآلة تغيّراً جذرياً في الحياة. لكن الأقطاب المعدنية اللاصقة الحالية صلبة، قد تهيج الجلد، وغالباً ما تنتج قراءات كهربائية مضطربة. يعرض هذا البحث قطباً ناعماً وصديقاً للبشرة «كالجِل» يلتصق بالجسم، يلتقط إشارات العضلات الطفيفة بوضوح أكبر، ويستخدمها لتوجيه يد روبوتية تحاكي الواقع.
رقعة ناعمة تشعر كأنها جلد
صمم الباحثون هيدروجيل جديد—مادة مرنة غنية بالماء تشبه عدسات الاتصال—تعمل كقطب على الجلد. جمعوا مكونات شائعة الاستعمال في البلاستيك مع مضافات طبيعية مثل الكيتوزان (مستخرج من القشريات) وحمض التانيك (موجود في النباتات)، بالإضافة إلى الجليسرول وأملاح بسيطة. تخلق هذه المكونات معاً شبكة مرنة ناقلة للأيونات تستطيع حمل الشحنات الكهربائية بينما تبقى طرية ورطبة على الجلد. عبر ضبط نسب كل مكوّن، أنتج الفريق نسخة يمكن أن تمتد أكثر من اثني عشر ضعف طولها الأصلي دون أن تنقطع وتواصل تقديم أداء كهربائي موثوق.
قوية، لاصقة، وقادرة على الشفاء الذاتي
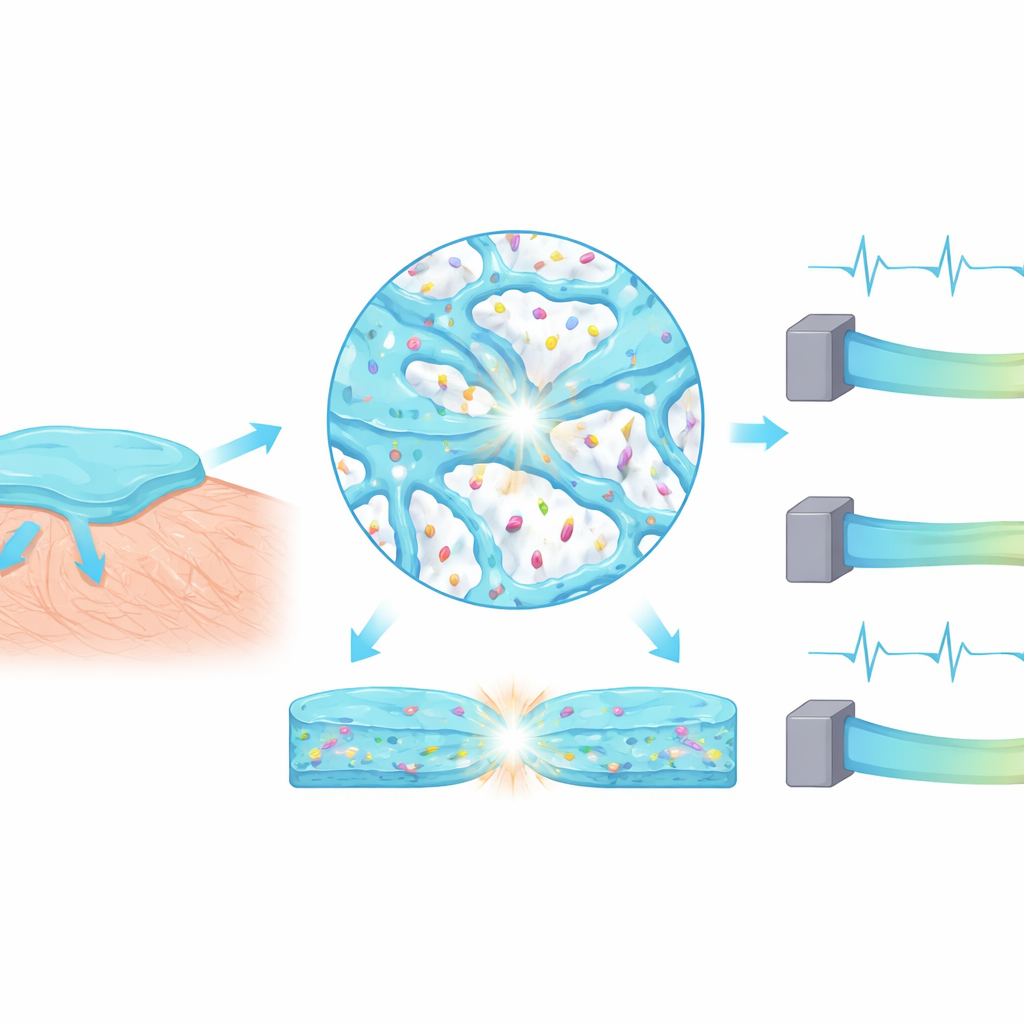
لكي تعمل جيداً على ذراع أو يد متحركة، يجب أن يبقى القطب في مكانه، ويصمد أمام الانثناء والسحب، ويستمر في العمل بعد تلف طفيف. يتفوّق الهيدروجيل الجديد في هذه المجالات الثلاثة. يظهر تحت المجهر بنية كثيفة إسفنجية تتكون من العديد من الروابط الضعيفة بين جزيئاته. تعمل هذه الروابط كممتصات صدمات، مما يسمح للمادة بالتمدد والالتواء والانضغاط ثم العودة إلى شكلها. كما تسمح لأجزاء الجل المقطوعة بإعادة الالتصاق مع مرور الزمن؛ فعندما قطع الفريق عينة إلى نصفين وضغط القطعتين معاً، شُفيت تدريجياً واستعادت معظم موصليتها الكهربائية الأصلية. وفي الوقت نفسه، تمنح المجموعات الكيميائية في حمض التانيك للجل التصاقاً قوياً بالعديد من الأسطح، من البلاستيك والمعادن إلى جلد الخنزير الحقيقي والبشر، وتظل هذه اللاصقية فعّالة حتى بعد عشرات دورات اللصق والفصل.
إشارات أنقى من العضلات العاملة
كانت الخطوة التالية هي اختبار مدى قدرة الجل الناعم على التقاط إشارات تخطيط كهربية سطح العضلات (sEMG)—الفولتية الخافتة التي تنتجها العضلات تحت الجلد مباشرة. وضع الباحثون أقطاب الهيدروجيل على ساعد المتطوعين وقارنوها بوسائد تجارية من فضة/كلوريد الفضة بنفس الحجم. أثناء مهام بسيطة مثل قبض واسترخاء القبضة، سجّلت كلا النوعين موجات واضحة، لكن الهيدروجيل قدّم نسبة إشارة إلى ضوضاء أعلى بوضوح. عملياً، يعني هذا أن إشارات العضلات المرغوبة برزت بشكل أوضح من التشويش الكهربائي الخلفي، وبقيت القراءات أكثر ثباتاً أثناء تحريك الأقطاب أو إعادة استخدامها. حتى بعد إعادة التثبيت المتكررة أو القطع المتعمد والشفاء الذاتي، واصلت رقع الهيدروجيل التقاط إشارات عالية الجودة، متفوقة على الوسائد المعدنية الجامدة.
تعليم يد روبوتية قراءة الإيماءات
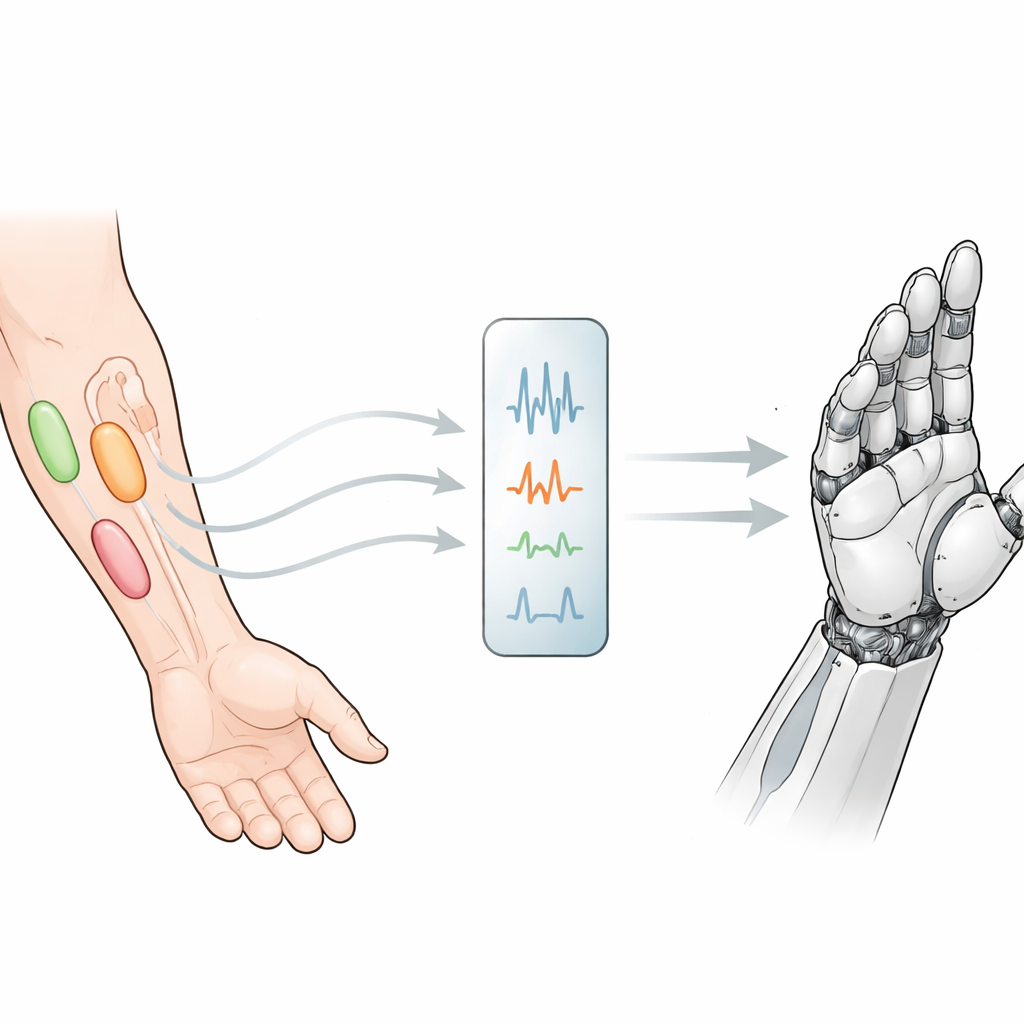
مع إشارات عضلية أنظف، بنى الفريق نظاماً كاملاً يحول تلك الإشارات إلى إيماءات يد مميزة. ركبوا أقطاب هيدروجيل متكاملة فوق عضلات المثنّي والباعد في الساعد وسجلوا الأنماط الكهربائية بينما قام المتطوعون بخمسة إيماءات شائعة، مثل إشارة «حسناً»، الإبهام لأعلى، فتح اليد، الإشارة بالإصبع، والقبضة المشدودة. من هذه التسجيلات، استخرج الباحثون ميزات إحصائية بسيطة—كم كانت الإشارة قوية، ومقدار ثباتها، ومدى سرعة تغيرها—وأدخلوها إلى نموذج حاسوبي. استخدموا خوارزمية تجمع بين شبكة عصبية سريعة التعلم وطريقة تحسين مستوحاة من سلوك أسراب الطيور. سمح هذا الثنائي للنظام بتعلّم بسرعة أي أنماط عضلية تقابل أي إيماءة بدقة عالية.
من أوامر أشبه بالتفكير إلى حركة فعلية
أخيراً، ربط الفريق برنامج التعرف بيد روبوتية محاكاة حيوية. عندما يكون المتطوع في إحدا الإيماءات المدربة، تلتقط أقطاب الهيدروجيل إشارات sEMG، تحدد الخوارزمية الإيماءة المقصودة، وتقلّد اليد الروبوتية الحركة في الوقت الحقيقي. عبر العديد من التجارب، صنّف النظام الإيماءات بشكل صحيح في أكثر من 94% من الحالات، رغم اعتماده فقط على مجموعة صغيرة من ميزات الإشارة البسيطة. للغير متخصصين، الخلاصة واضحة: رقعة جل ناعمة، قابلة للشفاء الذاتي ولاصقة يمكنها الاستماع إلى نشاط العضلات عبر الجلد براحة ووضوح أكبر من الوسائد المعدنية التقليدية، مما يتيح تحكماً موثوقاً بالروبوتات المعاونة. قد تؤسس هذه المقاربة لأيدي صناعية مستقبلية، وأدوات إعادة تأهيل، وأجهزة قابلة للارتداء تستجيب طبيعياً للغة الكهربائية للجسم.
الاستشهاد: Yu, Z., Gu, Y., Ren, Y. et al. Hydrogel-based electrodes for high-fidelity sEMG acquisition and robotic hand control. Microsyst Nanoeng 12, 107 (2026). https://doi.org/10.1038/s41378-026-01219-y
الكلمات المفتاحية: أقطاب هلامية, تخطيط كهربية سطح العضلات, أجهزة استشعار قابلة للارتداء, التعرف على الإيماءات, التحكم في اليد الروبوتية