Clear Sky Science · ar
روبوت موازٍ الأرجل بحجم حشرة قائم على آلية أوريغامي مدمجة بين الدفع والبنية
روبوتات صغيرة للأماكن الضيقة
تخيل روبوت إنقاذ صغير وخفيف بما يكفي لتفلتة من فتحة في جدار، أو الزحف على طول أنبوب ضيق، أو حتى السباحة عبر بركة ماء. تقدم هذه الورقة جهازًا من هذا النوع: روبوت بحجم راحة اليد يشبه الحشرة يُدعى PLioBot، مصنوع من ورقة واحدة مطوية، يتحرك بسرعة كبيرة بالنسبة لحجمه، ويتعامل مع أنواع متعددة من التضاريس الوعرة. يوضح الباحثون كيف أن الجمع بين طي ذكي ومحركات اهتزاز صغيرة يمكن أن يحول المواد المسطحة إلى مستكشفين رشيقين للأماكن الضيقة وصعبة الوصول.
من ورقة مسطحة إلى زاحف بأربع أرجل
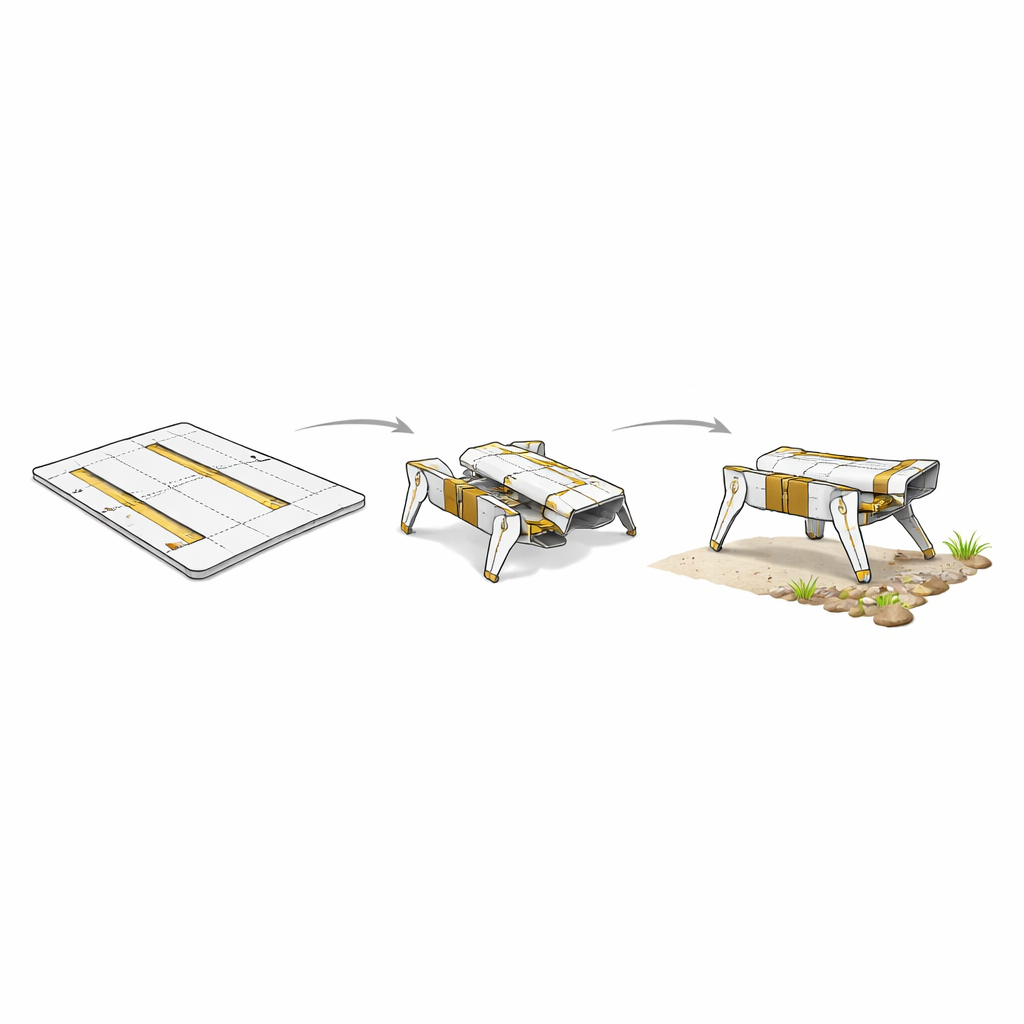
يبدأ PLioBot حياته كنمط مسطح، شبيه بلعبة ورقية مقطوعة ومطوية. بدلاً من الورق، يكون النمط ساندويتشًا مكوّنًا من خمس طبقات من ألياف زجاجية، ألياف كربون، غشاء بلاستيكي مرن، وشريط من السيراميك البيزوالكهربائي الذي يعمل كعضلات. تعمل المناطق الرقيقة الموضوعة بدقة في طبقة البلاستيك كمفاصل. بعد القص بالليزر، تُطوى البنية بأكملها بتسلسل منسق بحيث يظهر الجسم، والأرجل الأربع، والثمانية مشغلات كلها من قطعة مستمرة واحدة. دون براغي، دون محركات منفصلة، ودون محاذاة يدوية—إذ ينتج الطي وحده روبوتًا كاملًا بطول نحو 2.5 سنتيمتر ووزن 1.2 غرام فقط.
كيف تحقق الأرجل الصغيرة خطوات كبيرة
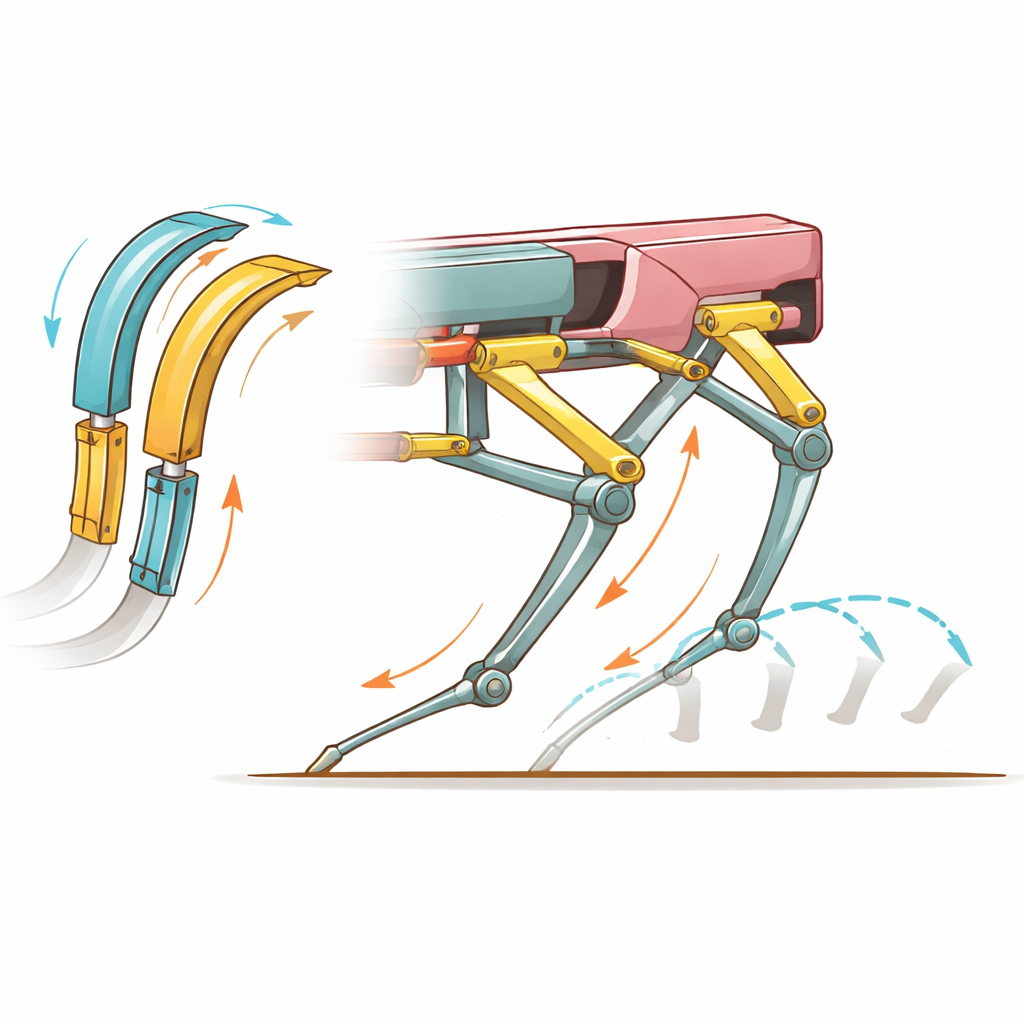
ينبع تحرك الروبوت من السيراميك البيزوالكهربائي—وهي مواد تنحني قليلًا عند تطبيق جهد كهربائي. يحمل كل جانب من PLioBot زوجًا من المشغلات الشريطية "التوأم". عندما تجعل الفولتية المتناوبة هذه الشرائط تنحني ذهابًا وإيابًا، تنتقل حركتها عبر مجموعة من الروابط المفصلية التي تعمل مثل آلية قدم موازية مصغرة. عن طريق توقيت الإشارات بعناية، يمكن لكل ساق أن تتحرك صعودًا وهبوطًا وكذلك إلى الأمام وإلى الخلف، مرسومة مسارًا حلقيًا بقدمه. تنسيق جميع الأرجل الأربع في نمط يشبه الهرولة يتيح للروبوت الدفع ضد الأرض بكفاءة والانطلاق إلى الأمام. في أفضل إعداداته يصل PLioBot إلى 44.6 سنتيمترًا في الثانية—حوالي 18 طول جسم في الثانية—مما يجعله واحدًا من أسرع الروبوتات ذات الأرجل على هذا المدى.
عضلات مدمجة، وقلة متاعب التجميع
تُجمع معظم الروبوتات بحجم الحشرات بعناء من العديد من الأجزاء الدقيقة: محركات أو مشغلات منفصلة، هياكل، وروابط يجب محاذاتها يدويًا. هذا يزيد التكلفة، ويحد من الدقة، ويجعل الإنتاج بالجملة صعبًا. يعالج المؤلفون هذا من خلال دمج البنية والتحريك بالكامل في "آلية أوريغامي" واحدة. يستخدمون عملية تلصيق محسنة تُقطع فيها كل الطبقات—قشور ألياف زجاجية صلبة، أقطاب كربون أليافية متعامدة، غشاء المفصل المرن، والأشرطة السيراميكية—وتُرص وتُحاذى باستخدام ثقوب الإبرة وتُضغط حراريًا معًا قبل أن يُطلق الشكل الخارجي نهائيًا بالليزر. النتيجة هي قطعة مسطحة متينة تحتوي بالفعل على هيكل الروبوت ومفاصله وعضلاته في مواضعها النهائية، جاهزة لأن تُطوى إلى شكلها النهائي.
المشي والتسلق والسباحة في التضاريس الواقعية
لاختبار ما إذا كان تصميمهم مفيدًا خارج مقعد المختبر، دفع الفريق PLioBot عبر مجموعة من العقبات اليومية. على الزجاج الأملس يخاطر بالانزلاق، لكنه لا يزال يتحرك بسرعة؛ على الإسفنج والأكريليك يكتسب احتكاكًا أكبر على حساب القليل من السرعة. يصعد المنحدرات حتى 12 درجة ويمكنه حمل حمولات أثقل من وزنه—حتى 1.7 غرام، مع أداء ممتاز بشكل خاص عند أوزان أقل من نحو 0.8 غرام. في أنفاق ضيقة بعرض 3 سنتيمترات وارتفاع أقل من 3 سنتيمترات فقط، يحمل الروبوت حمولة 1.4 غرام مع المحافظة على عدة أطوال جسم في الثانية. من خلال استبدال وسائد أقدام نصف كروية أو زعانف شبيهة بالمجاديف، يعبر PLioBot الحصى والعشب، يقطع رمالًا متحركة دون الغوص، يمشي على قاع حوض، وحتى يسبح على سطح الماء مستخدمًا زعانفه فقط للدفع.
ما يعنيه هذا لمستكشفين صغار في المستقبل
بكلمات بسيطة، تُظهر هذه العمل أنه يمكنك طباعة وطي روبوت صغير جدًا يكون جسمه وعضلاته قطعة واحدة، وأن هذا الروبوت يمكنه التحرك بسرعة والتعامل مع العديد من الأسطح الفوضوية الواقعية. لا يزال PLioBot يعتمد على أسلاك طاقة خارجية، لذا فهو ليس مستقلًا بالكامل بعد. لكن تصميم الأوريغامي المتكامل وطريقة التصنيع تشير إلى مستقبلٍ يمكن فيه إنتاج أعداد كبيرة من الروبوتات الرخيصة بحجم الحشرات كقطع مسطحة تُطوى إلى شكلها وتُزوّد ببطاريات صغيرة ودارات تحكم. قد تقوم مثل هذه السربات يومًا ما بجولات استكشافية لمباني متضررة، تفحص أنابيب صناعية، أو تستكشف كواكب أخرى—كل ذلك بدءًا من شيء يبدو في البداية كصفحة مُقطعة بذكاء.
الاستشهاد: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
الكلمات المفتاحية: روبوتات بحجم الحشرات, روبوتات الأوريغامي, محركات بيزوالكهربائية, تنقل متكيف مع التضاريس, تصنيع الميكرو‑روبوت