Clear Sky Science · ar
مشغلات سبائِك الذاكرة الشكلي على شكل أسلاك: النمذجة والتصميم والتحكم
أسلاك معدنية «تتذكر» شكلها
تخيل سلكًا معدنيًا رقيقًا يمكنه الانقباض مثل عضلة، أن يثني إصبع روبوت بهدوء، أن يعيد تشكيل جناح طائرة أثناء الطيران، أو أن يضغط برفق على قلب متعثر — كل ذلك بمجرد تسخينه وتبريده. تستعرض هذه المقالة مثل هذه الأسلاك المصنوعة من سبائك الذاكرة الشكلي (SMA)، وتشرح كيف تعمل، وكيف يصممها المهندسون ويضبطونها، وأين تُستخدم بالفعل في الروبوتات والطائرات والأجهزة الطبية وتقنيات القابلة للارتداء.
كيف تنبض الأسلاك المعدنية الذكية بالحياة
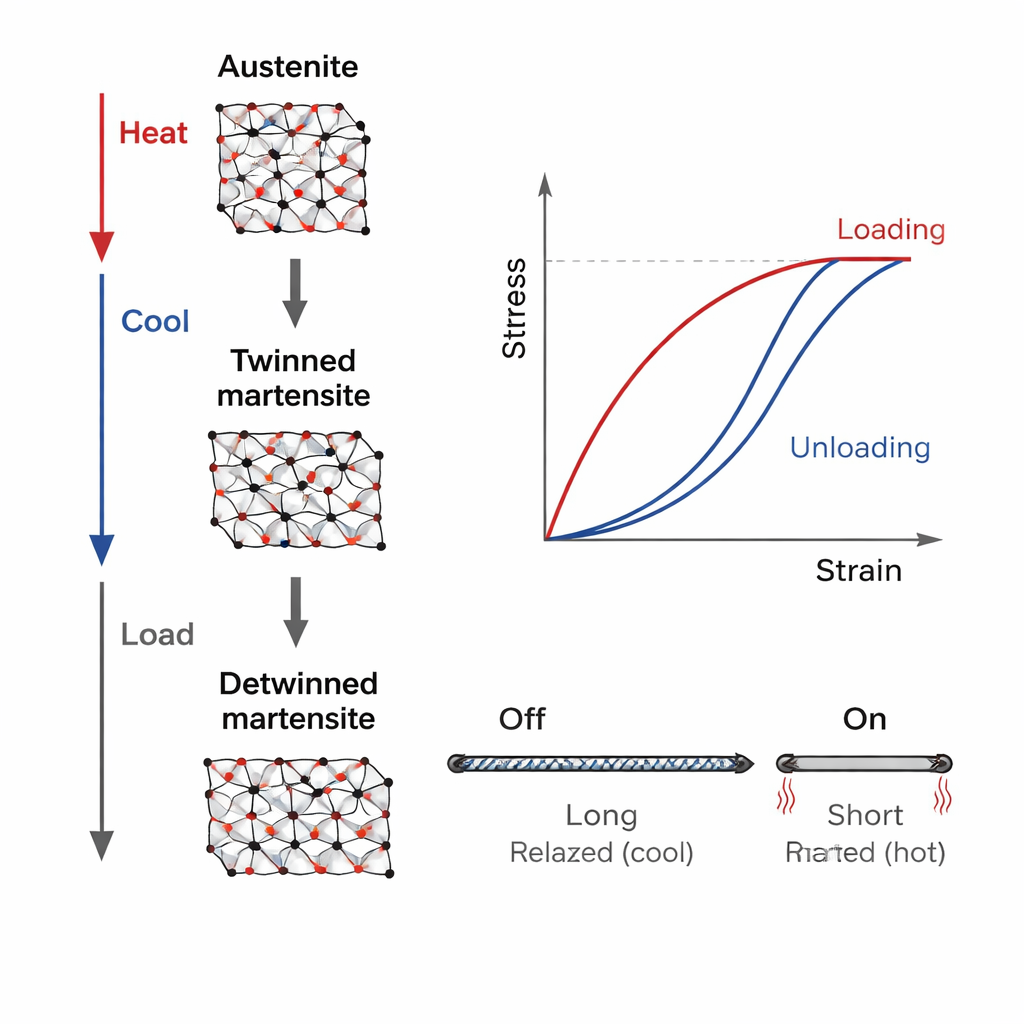
سبائك الذاكرة الشكليّة هي معادن خاصة يمكن تشويهها ثم تعود إلى شكل مُعيّن مسبقًا عند تغير درجة حرارتها. في وضعٍ يسمى تأثير الذاكرة الشكليّة، يمكنك ثني السلك عندما يكون باردًا ومرنًا نسبيًا؛ وعند تسخينه، يعود فجأة إلى شكله الأصلي. وفي وضعٍ آخر، يسمى الفائقة المرونة، يمكن للسبائك أن تمتد تحت حمل ثم تعود إلى حالتها عند إزالة الحمل. ينبع هذا السلوك داخل المعدن من تغيّرات طور صلب–صلب بين ترتيبات بلورية مختلفة، ما يجعل استجابته شديدة اللاخطية وصعبة التنبؤ إلى حد ما. وبما أن أسلاك SMA رفيعة، يمكن للمهندسين غالبًا معاملتها كعناصر أحادية البعد، مما يبسط النماذج الرياضية التي تصف كيف ترتبط الحرارة والإجهاد والانفعال والتيار الكهربائي.
من المعادلات إلى النماذج المعتمدة على البيانات
لاستخدام هذه الأسلاك الذكية بشكل موثوق، يحتاج المصممون إلى نماذج تتنبأ بمدى قوتها في السحب، ومدى تحركها، ومدى ارتفاع حرارتها، وكيف يتغير مقاومتها الكهربائية. تتعامل النماذج «الإنشائية» الكلاسيكية مع السلك كمادة كتلية وتتتبع كيف تتغير أطواره الداخلية مع الإجهاد ودرجة الحرارة. هذه النماذج فعّالة لكنها تعتمد على افتراضات مبسطة. بالتوازي، يستخدم الباحثون بشكل متزايد التعلم الآلي والشبكات العصبية لتعلم سلوك السلك مباشرة من البيانات التجريبية، ما يلتقط ظواهر الارتجاع والتأثيرات التاريخية الدقيقة. وفرع مهم آخر يفحص كيف تتطور مقاومة السلك الكهربائية ودرجة حرارته أثناء التسخين المدفوع بالتيار، مما يتيح الاستشعار الذاتي — القدرة على تقدير القوة أو الحركة بمجرد قياس المقاومة بدلاً من إضافة حسّاسات منفصلة.
بناء الحركة: أحمال بسيطة، هياكل لينة وعضلات صناعية
على مستوى الأجهزة، ينظم المقال المشغلات السلكية من سبائك الذاكرة الشكليّة حسب طريقة تحميلها. في أبسط التراكيب «الحمل الخطي»، يسحب سلك ضد نابض أو وزن لتشغيل قبضات أو آليات إفلات في الفضاء. أنظمة «الحمل غير الخطي» الأكثر تقدمًا تُضمّن أسلاكًا داخل شعاعات مرنة، بوليمرات لينة، أقمشة، أو هياكل شبيهة بالأوريغامي لتحقيق انحناءات كبيرة، روبوتات تزحف، وقفازات هياكل خارجية منسوجة. تستخدم التراكيب التفاضلية سلكين أو أكثر متقابلين، مقلدة أزواج العضلات مثل البايسبس والترايسبس، لتوفير حركة سريعة وقابلة للانعكاس في مفاصل مثل المرفق والكاحل الاصطناعيين. وبما أن سلك SMA يمكنه الانكماش بنحو 8% فقط، فإن موضوع التصميم الرئيسي هو تكبير الشوط: لف أسلاك طويلة حول بكرات، ترتيبها في مسارات منحنية، استخدام مراحل انزلاقية أو دوارة معيارية، أو اعتماد نوابض SMA لتحقيق حركات أكبر ضمن مساحات ضيقة.
تعليم الأسلاك الذكية الطاعة
التحكم في هذه المشغلات يمثل تحديًا لأن استجابتها تعتمد على كل من الحرارة والتاريخ الميكانيكي. تستعرض المقالة طيفًا من استراتيجيات التحكم، من متحكمات PID الكلاسيكية إلى مخططات أكثر تطورًا. تستخدم الأساليب القائمة على النماذج معادلات مشتقة من الفيزياء أو نماذج الارتجاع لتصميم متحكمات وضع الانزلاق ومقوّمات أمامية تعاكس لاخطية. تتقدم متحكمات الشبكات العصبية والتعلم المعزّز أبعد من ذلك، متعلمة كيفية قيادة السلك لحركة دقيقة دون الاعتماد على نماذج مثالية. في الوقت نفسه، تستخدم طرق التحكم بالاستشعار الذاتي تغير مقاومة السلك كإشارة تغذية راجعة مدمجة، أحيانًا مقترنة بشبكات عصبية، لتقدير الوضع أو القوة دون حسّاسات خارجية كبيرة.
الاستخدامات الواقعية والاتجاهات المستقبلية
تشغل مشغلات SMA السلكية بالفعل قبضات روبوتية لينة، روبوتات تزحف صغيرة، أجنحة طائرات متغيرة الشكل، أجهزة إفلات للأقمار الصناعية، مضخات وأطارات قابلة للزرع، لفائف مساعدة للقلب، ملابس ضغط، بدلات هياكل خارجية وقفازات إعادة تأهيل. عبر هذه المجالات جميعها، تبقى عقبات مشتركة: تبريد بطيء وتراكم حرارة، تعب عبر دورات عديدة، تعقيد التحكم، وتكلفة التصنيع. يجادل المؤلفون بأن التقدم سيكون معتمدًا على دمج ثلاثة خيوط: نماذج متعددة المقاييس ومحسّنة بالبيانات، تصاميم هيكلية أذكى تدمج SMA مع إلكترونيات مرنة ومواد متعددة الوظائف، واستراتيجيات تحكم ذكية تتكيف عبر الإنترنت. يتصورون أُطرًا موحّدة «نمذجة–تصميم–تحكم»، مدعومة بتوائم رقمية وتعلم آلي، يمكنها تحسين هذه العناصر معًا. لغير المختص، الرسالة أن هذه الأسلاك المتغيرة الشكل تنضج من فضوليات مختبرية إلى عضلات صناعية عملية، مع إمكانية إعادة تشكيل الآلات والأجهزة الطبية والأنظمة القابلة للارتداء بهدوء في السنوات المقبلة.
الاستشهاد: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
الكلمات المفتاحية: سبيكة الذاكرة الشكلي, الروبوتات اللينة, المشغلات الذكية, الهياكل المتغيرة الشكل, الأجهزة القابلة للارتداء