Clear Sky Science · ar
تحليل أخطاء الطور في أوضاع التشغيل لجايروسكوبات MEMS اعتمادًا على وضع قياس معدل القوة لإعادة التوازن
لماذا تهم الجايروسكوبات الصغيرة
من تثبيت الطائرات بدون طيار إلى توجيه السيارات الذاتية القيادة، تحتفظ حساسات الحركة الصغيرة المعروفة بجييروسكوبات MEMS بتوازن الأجهزة الحديثة ومسارها بهدوء. لقياس الدوران بدقة، تعتمد هذه الرقائق على حلقات تحكم إلكترونية متزامنة بعناية. تستكشف هذه الورقة كيف أن عدم التطابق الدقيق في التوقيت — المسمى أخطاء الطور — داخل هذه الحلقات يمكن أن يضعف الأداء، وتبين أي من هذه الأخطاء ذو تأثير جوهري وكيفية تصحيحها لكي تظل الجايروسكوبات دقيقة وموثوقة.
اهتزازان يشعران بالدوران
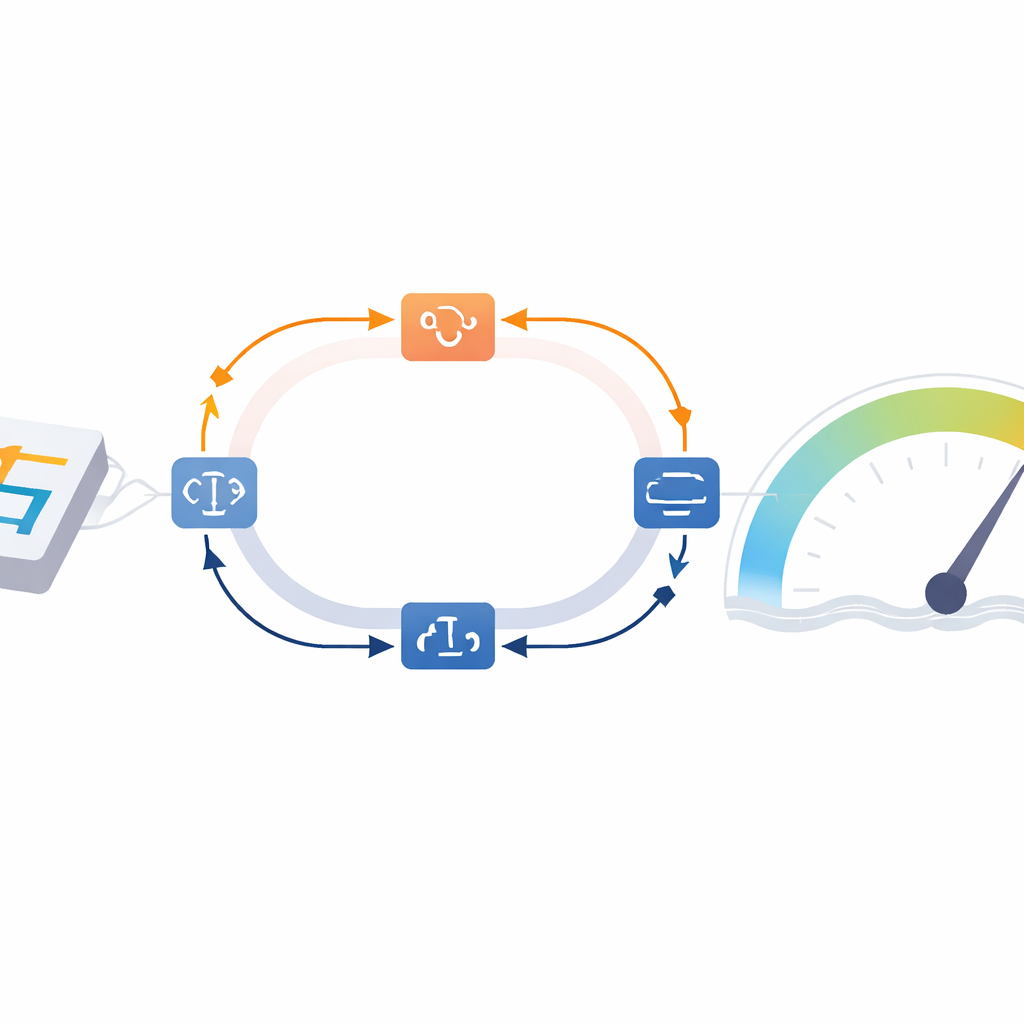
يعمل جايروسكوب MEMS عن طريق تحريك بنية سيليكونية صغيرة في اتجاهين متعامدين: وضع قيادي يُهز بنشاط، ووضع استشعاري يشعر بالدفع الجانبي الناتج عند دوران الجهاز. تحافظ الإلكترونيات على اهتزاز القيادة ثابتًا وتحول الحركة الدقيقة لوضع الاستشعار إلى قراءة معدل. في العديد من الجايروسكوبات المتقدمة، تُستخدم طريقة تسمى القوة لإعادة التوازن (FTR): بدلاً من ترك هيكل الاستشعار يتحرك بحرية، تدفعه الإلكترونيات بقوة تعادل حركته لإلغائها. مقدار القوة التصحيحية يكشف بعد ذلك عن معدل الدوران. تُقدَّر هذه الطريقة لاستقرارها، لكنها تعتمد بشدة على التوقيت الدقيق بين الإشارات.
أين يتسلل التوقيت إلى الخطأ
في الأجهزة الحقيقية، يجب أن تمر الإشارات عبر دوائر تناظرية تحول التغير في السعة إلى جهد، ومعالجة رقمية داخل شريحة FPGA، ومحولات بيانات تربط العالمين التناظري والرقمي. كل من هذه المراحل يمكن أن يغير طور الإشارات أو توقيتها بزاوية صغيرة. يجمع المؤلفون هذه أخطاء الطور في فئتين بسيطتين في كل مسار اهتزاز: تلك التي تحدث أثناء قياس ومعالجة الإشارات (مسار التغذية الراجعة) وتلك التي تحدث أثناء توليد إشارات الفعل (المسار الأمامي). ثم يبنون نموذجًا رياضيًا كاملاً لحلقات تحكم FTR، بما في ذلك كلا المسارين في كلا الوضعين، ويحَلِّلون كيف تؤثر مثل هذه الأخطاء على مقاييس الأداء الرئيسية مثل الانحياز، عامل القياس، حزمة النطاق الترددي، والقدرة على إلغاء الاقتران غير المرغوب فيه المعروف بخطأ الرباعي.
استكشاف جانب القيادة: آمن في الغالب
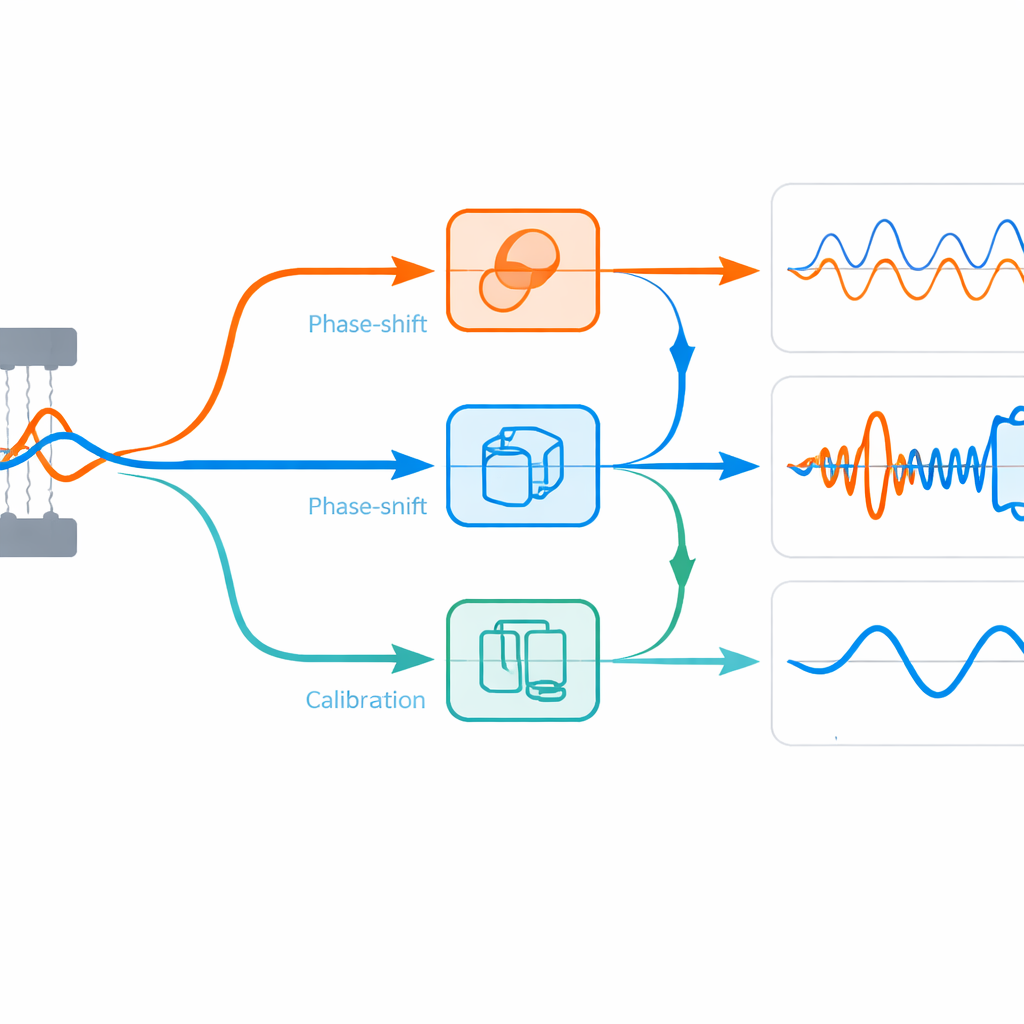
على جانب القيادة، تتسبب أخطاء الطور في أن تقفل حلقة التحكم قليلًا بعيدًا عن التردد الطبيعي الحقيقي للهيكل. للحفاظ على مستوى الاهتزاز ثابتًا، تستجيب الإلكترونيات بزيادة سعة القيادة. حدسيًا، قد يكون هذا مصدر قلق، لأن زيادة القيادة يمكن أن تتسرب إلى مسار الاستشعار كتسرُّب كهربائي. ومع ذلك، يستخدم الجايروسكوب المدروس هنا دائرة أمامية مصممة بعناية مع حاملة ترددية عالية وصمامات حلقيّة تكبح هذا التسرب إلى حد كبير. تُظهر المحاكاة والتجارب التفصيلية عند ثلاث درجات حرارة أنه، بمجرد أن يسخن الجهاز، تستقر أخطاء طور حلقة القيادة إلى قيم تقريبًا ثابتة وبعد معايرة بسيطة يكون تأثيرها ضئيلًا على الانحياز، الضوضاء، تصحيح الخطأ الرباعي، أو عرض نطاق FTR.
توقيت جانب الاستشعار: المسبب الحقيقي للمشكلة
يروي وضع الاستشعار قصة مختلفة. هنا، يجب أن تكون إشارة التغذية الراجعة التي تدفع الكتلة المهتزة وإشارات المرجع المستخدمة لاستخراج مكونات المعدل والرباعي في محاذاة محكمة. يستخرج المؤلفون نموذج حلقة FTR يتضمن صراحةً خطأ طور في مسار التغذية الراجعة للحس وخطأ آخر في مسار إلغاء التضمين الأمامي. يوضحون تحليليًا ثم تجريبيًا أن خطأ طور مسار التغذية الراجعة يغير مباشرة عامل القياس—التحويل بين الدوران الحقيقي والإخراج المقاس—ويزيد من إخراج الصفر المعدلي، الذي من المفترض أن يكون مستقرًا تمامًا عندما يكون الجايروسكوب في حالة سكون. في المقابل، فإن خطأ طور المسار الأمامي له تأثير طفيف فقط على هذه الخصائص الساكنة، وكلا خطأي جانب الاستشعار لهما تأثير ضئيل على عرض النطاق الديناميكي.
معايرة ما يهم أكثر
بناءً على هذه الرؤى، يقترح الفريق إجراءات معايرة عملية. لوضع القيادة، يقيسون فروق الطور بين موجات المرجع الداخلية والإشارة الفعلية للقيادة، ثم يعدلون الأطوار الرقمية حتى تصبح الإشارات متعامدة وتقل سعة القيادة إلى الحد الأدنى، كاشفة وملغيةً كلا خطأي المسار الأمامي والتغذية الراجعة. بالنسبة لوضع الاستشعار، يقومون أولًا بمحاذاة إشارة التغذية الراجعة مع مرجع لإصلاح خطأ مسار التغذية الراجعة الحرج. ثم يقومون عمدًا بتعزيز إشارة الرباعي بحيث تسود طورها، مما يجعل من السهل ضبط بقية طور المسار الأمامي بدقة. تُظهر الاختبارات عبر درجات حرارة أن هذه التصحيحات تتصرف كإزاحات ثابتة يجب إعادة تقديرها عند تغير الظروف، ولكن بمجرد تعيينها، فإنها تُثبّت عامل القياس والانحياز إلى حد كبير.
ماذا يعني هذا للمستشعرات المستقبلية
بعبارة بسيطة، تُظهر هذه الدراسة أن ليس كل أخطاء التوقيت في جايروسكوب MEMS ذات أهمية متساوية. مع كبح جيد للتسرب، فإن أخطاء الطور في حلقة القيادة وفي المسار الأمامي للاستشعار لها تأثير ضئيل على قراءة الدوران النهائية. الجاني السائد هو خطأ الطور في مسار التغذية الراجعة للاستشعار، الذي يعبث مباشرةً بـ"المسطرة" المستخدمة لقياس الدوران ويغير القراءة في حالة السكون. من خلال تحديد هذا الحلقة الضعيفة وتقديم استراتيجيات معايرة مستهدفة، يوفر العمل خارطة طريق لتصميم جايروسكوبات ذات استقرار أفضل أثناء التشغيل ويفتح الطريق أمام مخططات تعويض في الزمن الحقيقي يمكنها الحفاظ على الدقة حتى مع تغير درجة الحرارة وغيرها من الظروف.
الاستشهاد: Jia, J., Zhang, H., Gao, S. et al. Phase error analysis for MEMS gyroscopes operational modes based on force-to-rebalance rate measurement mode. Microsyst Nanoeng 12, 86 (2026). https://doi.org/10.1038/s41378-025-01144-6
الكلمات المفتاحية: جايروسكوب MEMS, تحكم القوة لإعادة التوازن, خطأ الطور, معايرة المستشعر, الملاحة بالقصور الذاتي